Attractors.jl
Attractors — ModuleAttractors.jl
![]()
![]()
![]()
![]()
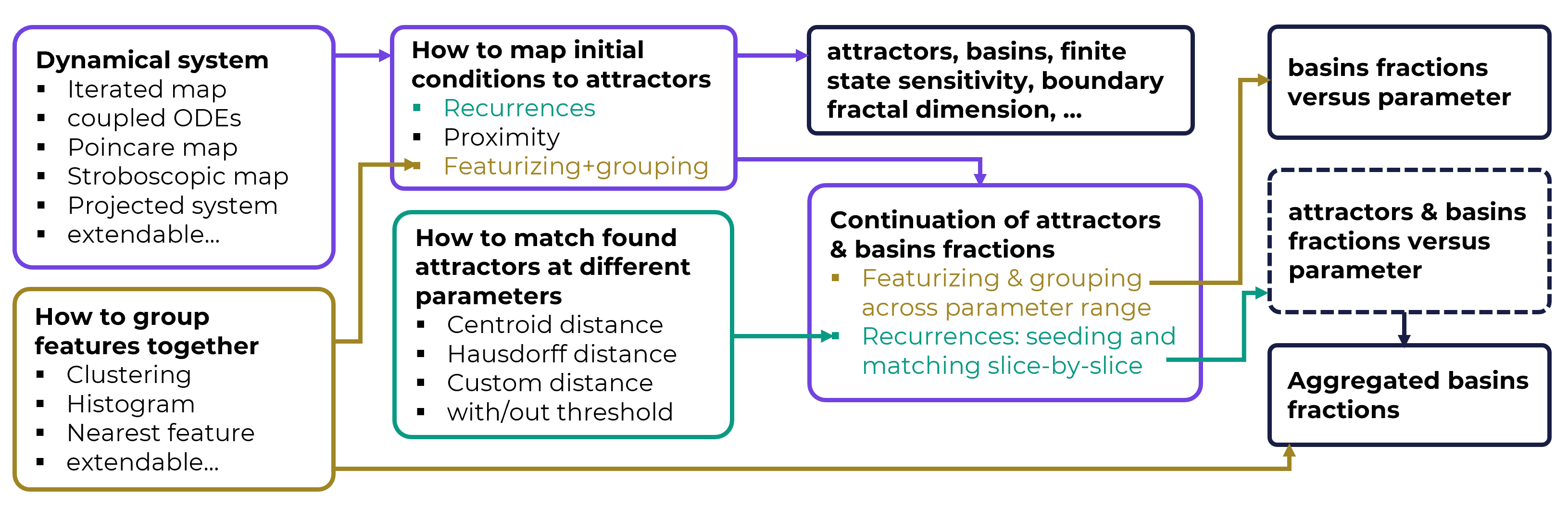
A Julia module for finding attractors of dynamical systems, their basins and their boundaries, fractal properties of the boundaries, as well as continuing attractors and their basins across parameters. It can be used as a standalone package, or as part of DynamicalSystems.jl.
To install it, run import Pkg; Pkg.add("Attractors").
All further information is provided in the documentation, which you can either find online or build locally by running the docs/make.jl file.
Previously, Attractors.jl was part of ChaosTools.jl
Outline of Attractors.jl
- First be sure that you are aware of what is a
DynamicalSystem. This is the input to the whole infrastructure of Attractors.jl. - The bulk of the work in Attractors.jl is done by the
AttractorMappertype, that instructs how to find attractors and maps initial conditions to them. It can be used in functions likebasins_fractions. - For grouping features, there is a sub-infrastructure for instructing how to group features, which is governed by
GroupingConfig. - The infrastructure of finding attractors and their basins fractions is then integrated into a brand new way of doing bifurcation analysis in the
continuationfunction. - See Examples for Attractors.jl for several applications in real world cases.
DynamicalSystem reference
The kinds of dynamical systems that can be used in Attractors.jl are listed below for reference
DynamicalSystemsBase.DynamicalSystem — TypeDynamicalSystemDynamicalSystem is an abstract supertype encompassing all concrete implementations of what counts as a "dynamical system" in the DynamicalSystems.jl library.
All concrete implementations of DynamicalSystem can be iteratively evolved in time via the step! function. Hence, most library functions that evolve the system will mutate its current state and/or parameters. See the documentation online for implications this has on for parallelization.
DynamicalSystem is further separated into two abstract types: ContinuousTimeDynamicalSystem, DiscreteTimeDynamicalSystem. The simplest and most common concrete implementations of a DynamicalSystem are DeterministicIteratedMap or CoupledODEs.
Description
The documentation of DynamicalSystem follows chapter 1 of Nonlinear Dynamics, Datseris & Parlitz, Springer 2022.
A ds::DynamicalSystem representes a flow Φ in a state space. It mainly encapsulates three things:
- A state, typically referred to as
u, with initial valueu0. The space thatuoccupies is the state space ofdsand the length ofuis the dimension ofds(and of the state space). - A dynamic rule, typically referred to as
f, that dictates how the state evolves/changes with time when calling thestep!function.fis a standard Julia function, see below. - A parameter container
pthat parameterizesf.pcan be anything, but in general it is recommended to be a type-stable mutable container.
In sort, any set of quantities that change in time can be considered a dynamical system, however the concrete subtypes of DynamicalSystem are much more specific in their scope. Concrete subtypes typically also contain more information than the above 3 items.
In this scope dynamical systems have a known dynamic rule f defined as a standard Julia function. Observed or measured data from a dynamical system are represented using StateSpaceSet and are finite. Such data are obtained from the trajectory function or from an experimental measurement of a dynamical system with an unknown dynamic rule.
Construction instructions on f and u
Most of the concrete implementations of DynamicalSystem, with the exception of ArbitrarySteppable, have two ways of implementing the dynamic rule f, and as a consequence the type of the state u. The distinction is done on whether f is defined as an in-place (iip) function or out-of-place (oop) function.
- oop :
fmust be in the formf(u, p, t) -> outwhich means that given a stateu::SVector{<:Real}and some parameter containerpit returns the output offas anSVector{<:Real}(static vector). - iip :
fmust be in the formf!(out, u, p, t)which means that given a stateu::AbstractArray{<:Real}and some parameter containerp, it writes in-place the output offinout::AbstractArray{<:Real}. The function must returnnothingas a final statement.
t stands for current time in both cases. iip is suggested for systems with high dimension and oop for small. The break-even point is between 10 to 100 dimensions but should be benchmarked on a case-by-case basis as it depends on the complexity of f.
Whether the dynamical system is autonomous (f doesn't depend on time) or not, it is still necessary to include t as an argument to f. Some algorithms utilize this information, some do not, but we prefer to keep a consistent interface either way. You can also convert any system to autonomous by making time an additional variable. If the system is non-autonomous, its effective dimensionality is dimension(ds)+1.
API
The API that the interface of DynamicalSystem employs is the functions listed below. Once a concrete instance of a subtype of DynamicalSystem is obtained, it can quieried or altered with the following functions.
The main use of a concrete dynamical system instance is to provide it to downstream functions such as lyapunovspectrum from ChaosTools.jl or basins_of_attraction from Attractors.jl. A typical user will likely not utilize directly the following API, unless when developing new algorithm implementations that use dynamical systems.
API - information
ds(t)withdsan instance ofDynamicalSystem: return the state ofdsat timet. For continuous time systems this interpolates and extrapolates, while for discrete time systems it only works iftis the current time.current_stateinitial_statecurrent_parametersinitial_parametersisdeterministicisdiscretetimedynamic_rulecurrent_timeinitial_timeisinplacesuccesful_step
API - alter status
DynamicalSystemsBase.DeterministicIteratedMap — TypeDeterministicIteratedMap <: DynamicalSystem
DeterministicIteratedMap(f, u0, p = nothing; t0 = 0)A deterministic discrete time dynamical system defined by an iterated map as follows:
\[\vec{u}_{n+1} = \vec{f}(\vec{u}_n, p, n)\]
An alias for DeterministicIteratedMap is DiscreteDynamicalSystem.
Optionally configure the parameter container p and initial time t0.
For construction instructions regarding f, u0 see DynamicalSystem.
DynamicalSystemsBase.CoupledODEs — TypeCoupledODEs <: ContinuousTimeDynamicalSystem
CoupledODEs(f, u0 [, p]; diffeq, t0 = 0.0)A deterministic continuous time dynamical system defined by a set of coupled ordinary differential equations as follows:
\[\frac{d\vec{u}}{dt} = \vec{f}(\vec{u}, p, t)\]
An alias for CoupledODE is ContinuousDynamicalSystem.
Optionally provide the parameter container p and initial time as keyword t0.
For construction instructions regarding f, u0 see DynamicalSystem.
DifferentialEquations.jl keyword arguments and interfacing
The ODEs are evolved via the solvers of DifferentialEquations.jl. When initializing a CoupledODEs, you can specify the solver that will integrate f in time, along with any other integration options, using the diffeq keyword. For example you could use diffeq = (abstol = 1e-9, reltol = 1e-9). If you want to specify a solver, do so by using the keyword alg, e.g.: diffeq = (alg = Tsit5(), reltol = 1e-6). This requires you to have been first using OrdinaryDiffEq to access the solvers. The default diffeq is:
(alg = Tsit5(stagelimiter! = triviallimiter!, steplimiter! = triviallimiter!, thread = static(false)), abstol = 1.0e-6, reltol = 1.0e-6)
diffeq keywords can also include callback for event handling , however the majority of downstream functions in DynamicalSystems.jl assume that f is differentiable.
The convenience constructor CoupledODEs(prob::ODEProblem, diffeq) and CoupledODEs(ds::CoupledODEs, diffeq) are also available.
Dev note: CoupledODEs is a light wrapper of ODEIntegrator from DifferentialEquations.jl. The integrator is available as the field integ, and the ODEProblem is integ.sol.prob. The convenience syntax ODEProblem(ds::CoupledODEs, tspan = (t0, Inf)) is available.
DynamicalSystemsBase.StroboscopicMap — TypeStroboscopicMap <: DiscreteTimeDynamicalSystem
StroboscopicMap(ds::CoupledODEs, period::Real) → smap
StroboscopicMap(period::Real, f, u0, p = nothing; kwargs...)A discrete time dynamical system that produces iterations of a time-dependent (non-autonomous) CoupledODEs system exactly over a given period. The second signature first creates a CoupledODEs and then calls the first.
StroboscopicMap follows the DynamicalSystem interface. In addition, the function set_period!(smap, period) is provided, that sets the period of the system to a new value (as if it was a parameter). As this system is in discrete time, current_time and initial_time are integers. The initial time is always 0, because current_time counts elapsed periods. Call these functions on the parent of StroboscopicMap to obtain the corresponding continuous time. In contrast, reinit! expects t0 in continuous time.
The convenience constructor
StroboscopicMap(T::Real, f, u0, p = nothing; diffeq, t0 = 0) → smapis also provided.
See also PoincareMap.
DynamicalSystemsBase.PoincareMap — TypePoincareMap <: DiscreteTimeDynamicalSystem
PoincareMap(ds::CoupledODEs, plane; kwargs...) → pmapA discrete time dynamical system that produces iterations over the Poincaré map[DatserisParlitz2022] of the given continuous time ds. This map is defined as the sequence of points on the Poincaré surface of section, which is defined by the plane argument.
See also StroboscopicMap, poincaresos.
Keyword arguments
direction = -1: Only crossings withsign(direction)are considered to belong to the surface of section. Positive direction means going from less than $b$ to greater than $b$.u0 = nothing: Specify an initial state.rootkw = (xrtol = 1e-6, atol = 1e-8): ANamedTupleof keyword arguments passed tofind_zerofrom Roots.jl.Tmax = 1e3: The argumentTmaxexists so that the integrator can terminate instead of being evolved for infinite time, to avoid cases where iteration would continue forever for ill-defined hyperplanes or for convergence to fixed points, where the trajectory would never cross again the hyperplane. If during onestep!the system has been evolved for more thanTmax, thenstep!(pmap)will terminate and error.
Description
The Poincaré surface of section is defined as sequential transversal crossings a trajectory has with any arbitrary manifold, but here the manifold must be a hyperplane. PoincareMap iterates over the crossings of the section.
If the state of ds is $\mathbf{u} = (u_1, \ldots, u_D)$ then the equation defining a hyperplane is
\[a_1u_1 + \dots + a_Du_D = \mathbf{a}\cdot\mathbf{u}=b\]
where $\mathbf{a}, b$ are the parameters of the hyperplane.
In code, plane can be either:
- A
Tuple{Int, <: Real}, like(j, r): the plane is defined as when thejth variable of the system equals the valuer. - A vector of length
D+1. The firstDelements of the vector correspond to $\mathbf{a}$ while the last element is $b$.
PoincareMap uses ds, higher order interpolation from DifferentialEquations.jl, and root finding from Roots.jl, to create a high accuracy estimate of the section.
PoincareMap follows the DynamicalSystem interface with the following adjustments:
dimension(pmap) == dimension(ds), even though the Poincaré map is effectively 1 dimension less.- Like
StroboscopicMaptime is discrete and counts the iterations on the surface of section.initial_timeis always0andcurrent_timeis current iteration number. - A new function
current_crossing_timereturns the real time corresponding to the latest crossing of the hyperplane, which is what thecurrent_state(ds)corresponds to as well. - For the special case of
planebeing aTuple{Int, <:Real}, a specialreinit!method is allowed with input state of lengthD-1instead ofD, i.e., a reduced state already on the hyperplane that is then converted into theDdimensional state.
Example
using DynamicalSystemsBase
ds = Systems.rikitake(zeros(3); μ = 0.47, α = 1.0)
pmap = poincaremap(ds, (3, 0.0))
step!(pmap)
next_state_on_psos = current_state(pmap)DynamicalSystemsBase.ProjectedDynamicalSystem — TypeProjectedDynamicalSystem <: DynamicalSystem
ProjectedDynamicalSystem(ds::DynamicalSystem, projection, complete_state)A dynamical system that represents a projection of an existing ds on a (projected) space.
The projection defines the projected space. If projection isa AbstractVector{Int}, then the projected space is simply the variable indices that projection contains. Otherwise, projection can be an arbitrary function that given the state of the original system ds, returns the state in the projected space. In this case the projected space can be equal, or even higher-dimensional, than the original.
complete_state produces the state for the original system from the projected state. complete_state can always be a function that given the projected state returns a state in the original space. However, if projection isa AbstractVector{Int}, then complete_state can also be a vector that contains the values of the remaining variables of the system, i.e., those not contained in the projected space. In this case the projected space needs to be lower-dimensional than the original.
Notice that ProjectedDynamicalSystem does not require an invertible projection, complete_state is only used during reinit!. ProjectedDynamicalSystem is in fact a rather trivial wrapper of ds which steps it as normal in the original state space and only projects as a last step, e.g., during current_state.
Examples
Case 1: project 5-dimensional system to its last two dimensions.
ds = Systems.lorenz96(5)
projection = [4, 5]
complete_state = [0.0, 0.0, 0.0] # completed state just in the plane of last two dimensions
pds = projected_integrator(ds, projection, complete_state)
reinit!(pds, [0.2, 0.4])
step!(pds)
get_state(pds)Case 2: custom projection to general functions of state. julia ds = Systems.lorenz96(5) projection(u) = [sum(u), sqrt(u[1]^2 + u[2]^2)] complete_state(y) = repeat(y[1]/5, 5) pds = # same as in above example...`
DynamicalSystemsBase.ArbitrarySteppable — TypeArbitrarySteppable <: DiscreteTimeDynamicalSystem
ArbitrarySteppable(
model, step!, extract_state, extract_parameters, reset_model!;
isdeterministic = true, set_state = reinit!,
)A dynamical system generated by an arbitrary "model" that can be stepped in-place with some function step!(model) for 1 step. The state of the model is extracted by the extract_state(model) -> u function The parameters of the model are extracted by the extract_parameters(model) -> p function. The system may be re-initialized, via reinit!, with the reset_model! user-provided function that must have the call signature
reset_model!(model, u, p)given a (potentially new) state u and parameter container p, both of which will default to the initial ones in the reinit! call.
ArbitrarySteppable exists to provide the DynamicalSystems.jl interface to models from other packages that could be used within the DynamicalSystems.jl library. ArbitrarySteppable follows the DynamicalSystem interface with the following adjustments:
initial_timeis always 0, as time counts the steps the model has taken since creation or lastreinit!call.set_state!is the same asreinit!by default. If not, the keyword argumentset_stateis a functionset_state(model, u)that sets the state of the model tou.- The keyword
isdeterministicshould be set properly, as it decides whether downstream algorithms should error or not.
StateSpaceSet reference
StateSpaceSets.StateSpaceSet — TypeStateSpaceSet{D, T} <: AbstractStateSpaceSet{D,T}A dedicated interface for sets in a state space. It is an ordered container of equally-sized points of length D. Each point is represented by SVector{D, T}. The data are a standard Julia Vector{SVector}, and can be obtained with vec(ssset::StateSpaceSet). Typically the order of points in the set is the time direction, but it doesn't have to be.
When indexed with 1 index, StateSpaceSet is like a vector of points. When indexed with 2 indices it behaves like a matrix that has each of the columns be the timeseries of each of the variables. When iterated over, it iterates over its contained points. See description of indexing below for more.
StateSpaceSet also supports almost all sensible vector operations like append!, push!, hcat, eachrow, among others.
Description of indexing
In the following let i, j be integers, typeof(X) <: AbstractStateSpaceSet and v1, v2 be <: AbstractVector{Int} (v1, v2 could also be ranges, and for performance benefits make v2 an SVector{Int}).
X[i] == X[i, :]gives theith point (returns anSVector)X[v1] == X[v1, :], returns aStateSpaceSetwith the points in those indices.X[:, j]gives thejth variable timeseries (or collection), asVectorX[v1, v2], X[:, v2]returns aStateSpaceSetwith the appropriate entries (first indices being "time"/point index, while second being variables)X[i, j]value of thejth variable, at theith timepoint
Use Matrix(ssset) or StateSpaceSet(matrix) to convert. It is assumed that each column of the matrix is one variable. If you have various timeseries vectors x, y, z, ... pass them like StateSpaceSet(x, y, z, ...). You can use columns(dataset) to obtain the reverse, i.e. all columns of the dataset in a tuple.
- DatserisParlitz2022Datseris & Parlitz 2022, Nonlinear Dynamics: A Concise Introduction Interlaced with Code, Springer Nature, Undergrad. Lect. Notes In Physics