Orbit diagrams
An orbit diagram is a way to visualize the asymptotic behaviour of a map, when a parameter of the system is changed. In practice an orbit diagram is a simple plot that plots the last n states of a dynamical system at a given parameter, repeated for all parameters in a range of interest. While this concept can apply to any kind of system, it makes most sense in discrete time dynamical systems. See Chapter 4 of Nonlinear Dynamics, Datseris & Parlitz, Springer 2022, for a more involved discussion on orbit diagrams for both discrete and continuous time systems.
ChaosTools.orbitdiagram — Function
orbitdiagram(ds::DynamicalSystem, i, p_index, pvalues; kwargs...) → odCompute the orbit diagram (sometimes wrongly called bifurcation diagram) of the given dynamical system, saving the i variable(s) for parameter values pvalues. The p_index specifies which parameter to change via set_parameter!(ds, p_index, pvalue). Works for any kind of DynamicalSystem, although it mostly makes sense with one of DeterministicIteratedMap, StroboscopicMap, PoincareMap.
An orbit diagram is simply a collection of the last n states of ds as ds is evolved. This is done for each parameter value.
i can be Int or AbstractVector{Int}. If i is Int, od is a vector of vectors. Else od is a vector of vectors of vectors. Each entry od od are the points at each parameter value, so that length(od) == length(pvalues) and length(od[j]) == n, ∀ j.
Keyword arguments
n::Int = 100: Amount of points to save for each parameter value.Δt = 1: Stepping time between saving points.u0 = nothing: Specify an initial state. Ifnothing, the previous state after each parameter is used to seed the new initial condition at the new parameter (with the very first state being the system's state). This makes convergence to the attractor faster, necessitating smallerTtr. Otherwiseu0can be a standard state, or a vector of states, so that a specific state is used for each parameter.Ttr::Int = 10: Each orbit is evolved forTtrfirst before saving output.ulims = (-Inf, Inf): only record system states withinulims(only valid ifi isa Int). Iteration continues untilnstates fall withinulims.show_progress = false: Display a progress bar (counting the parameter values).periods = nothing: Only valid ifds isa StroboscopicMap. If given, it must be a a container with same layout aspvalues. Provides a value for theperiodfor each parameter value. Useful in case the orbit diagram is produced versus a driving frequency.
Deterministic iterated map
For example, let's compute the famous orbit diagram of the logistic map:
using ChaosTools, CairoMakie
logistic_rule(x, p, n) = @inbounds SVector(p[1]*x[1]*(1-x[1]))
logistic = DeterministicIteratedMap(logistic_rule, [0.4], [4.0])
i = 1
parameter = 1
pvalues = 2.5:0.004:4
n = 2000
Ttr = 2000
output = orbitdiagram(logistic, i, parameter, pvalues; n, Ttr)
L = length(pvalues)
x = Vector{Float64}(undef, n*L)
y = copy(x)
for j in 1:L
x[(1 + (j-1)*n):j*n] .= pvalues[j]
y[(1 + (j-1)*n):j*n] .= output[j]
end
fig, ax = scatter(x, y; axis = (xlabel = L"r", ylabel = L"x"),
markersize = 0.8, color = ("black", 0.05),
)
ax.title = "Logistic map orbit diagram"
xlims!(ax, pvalues[1], pvalues[end]); ylims!(ax,0,1)
fig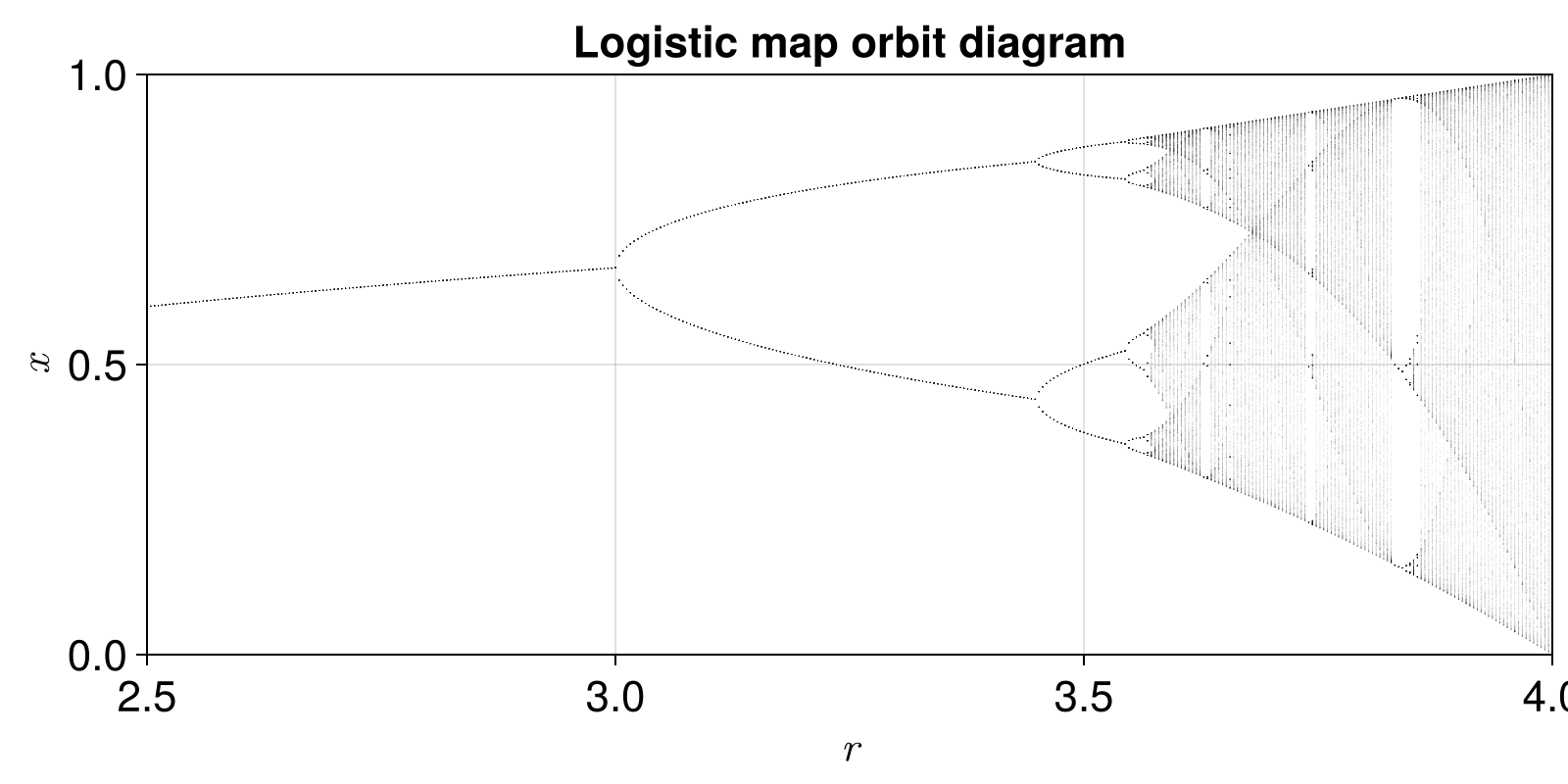
Stroboscopic map
The beauty of orbitdiagram is that it can be directly applied to any kind of DynamicalSystem. The most useful cases are the already seen DeterministicIteratedMap, but also PoincareMap and StroboscopicMap. Here is an example of the orbit diagram for the Duffing oscillator (making the same as Figure 9.2 of Nonlinear Dynamics, Datseris & Parlitz, Springer 2022).
using ChaosTools, CairoMakie
function duffing_rule(u,p,t)
d, a, ω = p
du1 = u[2]
du2 = -u[1] - u[1]*u[1]*u[1] - d*u[2] + a*sin(ω*t)
return SVector(du1, du2)
end
T0 = 25.0
p0 = [0.1, 7, 2π/T0]
u0 = [1.1, 1.1]
ds = CoupledODEs(duffing_rule, u0, p0)
duffing = StroboscopicMap(ds, T0)
# We want to change both the parameter `ω`, but also the
# period of the stroboscopic map. `orbitdiagram` allows this!
Trange = range(8, 26; length = 201)
ωrange = @. 2π / Trange
n = 200
output = orbitdiagram(duffing, 1, 3, ωrange; n, u0, Ttr = 100, periods = Trange)
L = length(Trange)
x = Vector{Float64}(undef, n*L)
y = copy(x)
for j in 1:L
x[(1 + (j-1)*n):j*n] .= Trange[j]
y[(1 + (j-1)*n):j*n] .= output[j]
end
fig, ax = scatter(x, y; axis = (xlabel = L"T", ylabel = L"u_1"),
markersize = 8, color = ("blue", 0.25),
)
ylims!(ax, -1, 1)
fig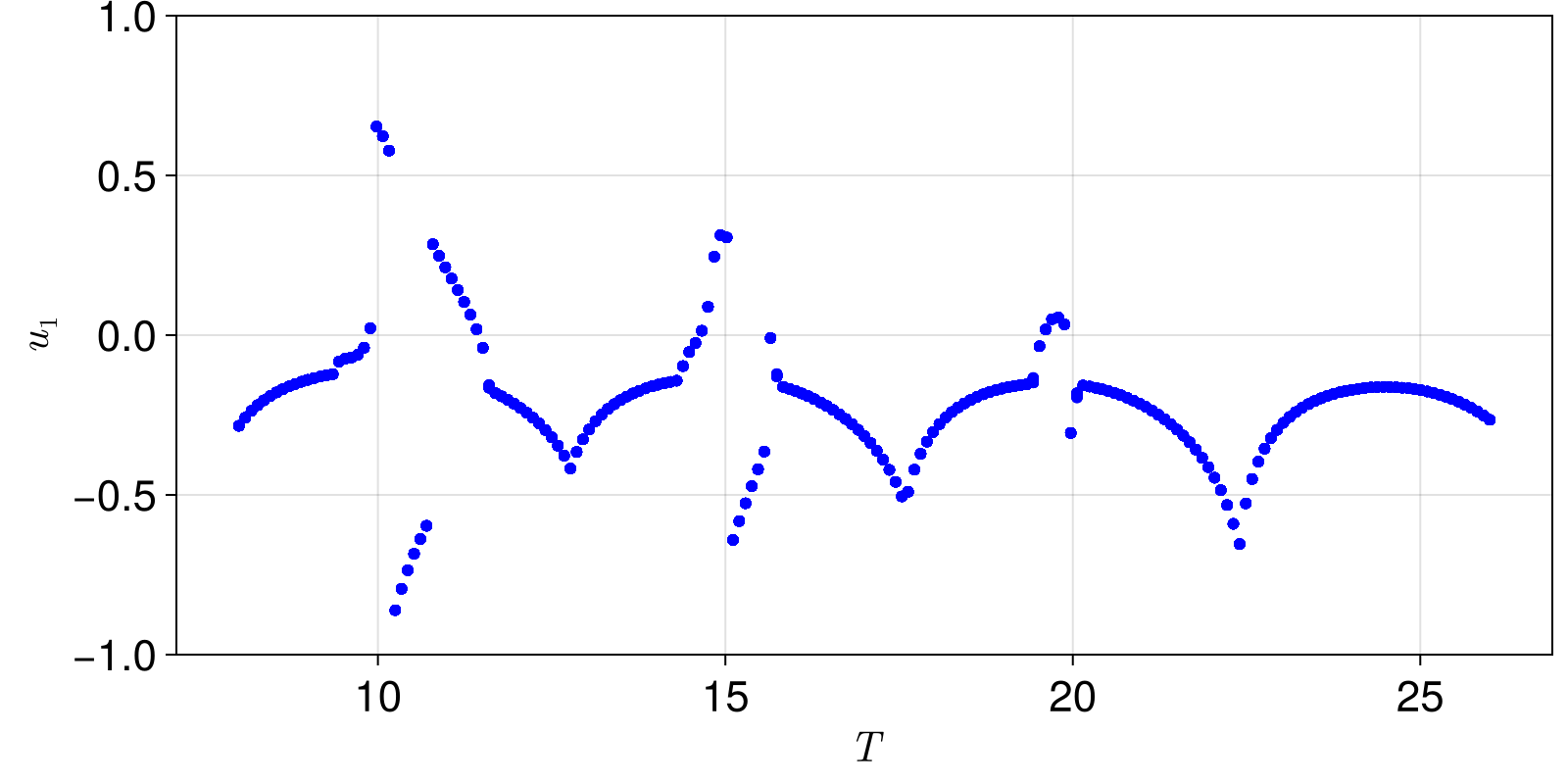
Pro tip: to actually make Fig. 9.2 you'd have to do two modifications: first, pass periods = Trange ./ 2, so that points are recorded every half period. Then, at the very end, do y[2:2:end] .= -y[2:2:end] so that the symmetric orbits are recorded as well