API
The API of Agents.jl is defined on top of the fundamental structures AgentBasedModel, Space, AbstractAgent which are described in the Tutorial page. In this page we list the remaining API functions, which constitute the bulk of Agents.jl functionality.
AgentBasedModel
Agents.AgentBasedModel — Type
AgentBasedModelAgentBasedModel is the abstract supertype encompassing models in Agents.jl. All models are some concrete implementation of AgentBasedModel and follow its interface (see below). ABM is an alias to AgentBasedModel.
Available concrete implementations
It is also straightforward to create your own versions of AgentBasedModel, see the corresponding entry in the developer documentation.
Interface of AgentBasedModel
step!(model, args...)progress the model forwards in time.model[id]returns the agent with givenid.abmproperties(model)returns thepropertiescontainer storing model-level properties.model.property: If the modelpropertiesis a dictionary with key typeSymbol, or if it is a composite type (struct), then the syntaxmodel.propertywill return the model property with key:property.abmtime(model)will return the current time of the model. All models start from time 0 and time is incremented as the model isstep!-ped.abmrng(model)will return the random number generator of the model. It is strongly recommended to giveabmrng(model)to all calls torandand similar functions, so that reproducibility can be established in your modelling workflow.allids(model)/allagents(model)returns an iterator over all IDs/agents in the model.hasid(model, id)returnstrueif the model has an agent with givenid.
AgentBasedModel defines an extendable interface composed of the above syntax as well as a few more additional functions described in the Developer's Docs. Following this interface you can implement new variants of an AgentBasedModel. The interface allows instances of AgentBasedModel to be used with any of the API. For example, functions such as random_agent, move_agent! or add_agent! do not need to be implemented manually but work out of the box provided the AgentBasedModel interface is followed.
CommonSolve.step! — Method
step!(model::ABM)Perform one simulation step for the model. For continuous time models, this means to run to the model up to the next event and perform that.
step!(model::ABM, t::Real)Step the model forwards until there is a temporal difference ≥ t from the current model time. I.e., step the model forwards for at least t time. For discrete time models like StandardABM t must be integer and evolves the model for exactly t steps.
step!(model::ABM, f::Function)Step the model forwards until f(model, t) returns true, where t is the current amount of time the model has been evolved for, starting from the model's initial time.
See also Advanced stepping.
Discrete time ABM
Agents.StandardABM — Type
StandardABM <: AgentBasedModelA concrete implementation of an AgentBasedModel, which is also the most commonly used in agent based modelling studies. It operates in discrete time. As input, it requires at least one, or at most two functions: an agent stepping function and a model stepping function. At each discrete step of the simulation, the agent stepping function is applied once to all scheduled agents, and the model stepping function is applied once to the model.
See also EventQueueABM for a continuous time variant.
To construct a StandardABM use the syntax:
StandardABM(AgentType(s) [, space]; properties, agent_step!, model_step!, kwargs...)The model expects agents of type AgentType(s) living in the given space. AgentType(s) is the result of @agent or @multiagent or a Union of agent types.
space is a subtype of AbstractSpace, see Space for all available spaces. If it is omitted then all agents are virtually in one position and there is no spatial structure. Spaces are mutable objects and are not designed to be shared between models. Create a fresh instance of a space with the same properties if you need to do this.
The evolution rules are functions given to the keywords agent_step!, model_step!.
Keywords
agent_step!: the optional agent stepping function that must be in the formagent_step!(agent, model)and is called for each scheduledagent.model_step!: the optional model stepping function that must be in the formmodel_step!(model). At least one ofagent_step!ormodel_step!must be given. For complicated models, it could be more suitable to use onlymodel_step!to evolve the model, see below the "advanced stepping" example.container = Dict: the type of container the agents are stored at. UseVectorif no agents are removed during the simulation. This allows storing agents more efficiently, yielding faster retrieval and iteration over agents. UseDictif agents are expected to be removed during the simulation. Experimental: UseStructVectorfrom StructArrays.jl to enable struct-of-arrays (SoA) storage for performance benefits in some applications with large numbers of agents and fixed fields. The agent type should be wrapped inSoAType(e.g.,SoAType{MyAgent}).StructVectorcurrently only works for single agent models.properties = nothing: additional model-level properties that the user may include in the model.propertiescan be an arbitrary container of data, however it is most typically aDictwithSymbolkeys, or a composite type (struct).scheduler = Schedulers.fastest: is the scheduler that decides the (default) activation order of the agents. See the scheduler API for more options. By default all agents are activated once per step in the fastest sequence possible.scheduleris completely ignored if noagent_step!function is given, as it is assumed that in this case the user takes control of scheduling, e.g., as in the "advanced stepping" example below.rng = Random.default_rng(): the random number generator stored and used by the model in all calls to random functions. Accepts any subtype ofAbstractRNG.agents_first::Bool = true: whether to schedule and activate agents first and then call themodel_step!function, or vice versa. Ignored if noagent_step!is given.warn=true: some type tests forAgentType(s)are done, and by default warnings are thrown when appropriate.
Some advanced models may require special handling for scheduling, or may need to schedule agents several times and act on different subsets of agents with different functions during a single simulation step. In such a scenario, it is more sensible to provide only a model stepping function, where all the dynamics is contained within.
Note that if you do not use the automated agent_step! option, you need to manually check for removed agents during evolution, using the hasid function.
Here is an example:
function complex_model_step!(model)
# tip: these schedulers should be defined as properties of the model
scheduler1 = Schedulers.Randomly()
scheduler2 = user_defined_function_with_model_as_input
for id in scheduler1(model)
agent_step1!(model[id], model)
end
intermediate_model_action!(model)
for id in scheduler2(model)
# here `agent_step2!` may delete agents, so we check for it manually
hasid(model, id) || continue
agent_step2!(model[id], model)
end
if model.step_counter % 100 == 0
model_action_every_100_steps!(model)
end
final_model_action!(model)
return
endContinuous time ABM
Agents.EventQueueABM — Type
EventQueueABM <: AgentBasedModelA concrete implementation of an AgentBasedModel which operates in continuous time, in contrast with the discrete time nature of StandardABM.
Here is a summary of how the time evolution of this model works:
A list of possible events that can be created is provided to the model. The events have four pieces of information:
- The action that they perform once triggered. The action is a generic Julia function
action!(agent, model)that will act on the agent corresponding to the event. Similarly withagent_step!forStandardABM, this function may do anything and utilize any function from the Agents.jl API or the entire Julia ecosystem. Theaction!function may spawn new events by usingadd_event!function, however the default behavior is to generate new events automatically, see below. - The propensity of the event. A propensity is a concept similar to a probability mass. When automatically generating a new event for an agent, first all applicable events for that agent are collected. Then, their propensities are calculated. The event generated then is selected randomly by weighting each possible event by its propensity.
- The agent type(s) the event applies to. By default it applies to all types.
- The timing of the event, i.e., when should it be triggered once it is generated. By default this is an exponentially distributed random variable divided by the propensity of the event. I.e., it follows a Poisson process with the propensity as the "rate". The timings of the events therefore establish the natural timescales of the ABM.
Events are scheduled in a temporally ordered queue, and once the model evolution time reaches the event time, the event is "triggered". This means that first the event action is performed on its corresponding agent. By default, once an event has finished its action, a new event is generated for the same agent (if the agent still exists), chosen randomly based on the propensities as discussed above. Then a time for the new event is generated and the new event is added back to the queue. In this way, an event always generates a new event after it has finished its action (by default; this can be overwritten). Keep in mind that the scheduling and triggering of events is agnostic to what the events actually do; even if an event does nothing, it would still "use up" the agent's time if scheduled. You can avoid this by assigning propensity 0 to such events in the propensity function, according to the agent and model state.
EventQueueABM is a generalization of "Gillespie"-like simulations, offering more power and flexibility than a standard Gillespie simulation, while also allowing "Gillespie"-like configuration with the default settings.
Here is how to construct an EventQueueABM:
EventQueueABM(AgentType, events [, space]; kwargs...)Create an instance of an EventQueueABM.
The model expects agents of type AgentType(s) living in the given space. AgentType(s) is the result of @agent or @multiagent or a Union of agent types.
space is a subtype of AbstractSpace, see Space for all available spaces.
events is a container of instances of AgentEvent, which are the events that are scheduled and then affect agents. A Tuple or NamedTuple for events leads to optimal performance. The key type of events is also what is given as index to add_event!.
By default, each time a new agent is added to the model via add_agent!, a new event is generated based on the pool of possible events that can affect the agent. In this way the simulation can immediatelly start once agents have been added to the model. You can disable this behavior with a keyword. In this case, you need to manually use the function add_event! to add events to the queue so that the model can be evolved in time. (you can always use this function regardless of the default event scheduling behavior)
Keyword arguments
container, properties, rng, warn: same as inStandardABM.autogenerate_on_add::Bool = true: whether to automatically generate a new event for an agent when the agent is added to the model.autogenerate_after_action::Bool = true: whether to automatically generate a new event for an agent after an event affected said agent has been triggered.
This model does not yet support IO operations such as save_checkpoint. Pull Requests that implement this are welcomed!
Agents.AgentEvent — Type
AgentEvent(; action!, propensity, kinds, timing)An event instance that can be given to EventQueueABM.
action! = dummystep: is the functionaction!(agent, model)that will act on the agent the event corresponds to. This keyword is mandatory. Theaction!function may calladd_event!to generate new events, regardless of the automatic generation of events by Agents.jl.propensity = 1.0: it can be either a constant real number, or a functionpropensity(agent, model)that returns the propensity of the event. This function is called when a new event is generated for the givenagent.types = AbstractAgent: the types of agents theaction!function can be applied to.timing = Agents.exp_propensity: decides how long after its generation the event should trigger. By default the time is a randomly sampled time from an exponential distribution with parameter the total propensity of all applicable events to the agent. I.e., by default the "Gillespie" algorithm is used to time the events. Alternatively, it can be a custom functiontiming(agent, model, propensity)which will return the time.
Notice that when using the add_event! function, propensity, timing are ignored if event_idx and t are given.
Agents.add_event! — Function
add_event!(agent, model)Generate a randomly chosen event for the agent and add it to the queue, based on the propensities and as described in EventQueueABM.
add_event!(agent, event_idx, t::Real, model::EventQueueABM)Add a new event to the queue to be triggered for agent, based on the index of the event (from the given events to the model). The event will trigger in t time from the current time of the model.
Reinforcement learning ABM
Agents.ReinforcementLearningABM — Type
ReinforcementLearningABM <: AgentBasedModelA concrete implementation of an AgentBasedModel that extends StandardABM with built-in reinforcement learning capabilities. This model type integrates RL training into the ABM framework, allowing agents to learn and adapt their behavior through interaction with the environment. This documentation string contains the necessary information, but we recommend going through the dedicated reinforcement learning tutorial as well.
This functionality is formally a package extension. To access it you need to be using Crux.
Key Features
- Integrated RL Training: Built-in support for training agents using various RL algorithms
- Multi-Agent Learning: Support for training multiple agent types simultaneously or sequentially
- Flexible Observation Models: Customizable observation functions for different agent types
- Reward Engineering: User-defined reward functions for different learning objectives
- Policy Management: Automatic management of trained policies and their deployment
Usage Overview
For a complete tutorial on using ReinforcementLearningABM, see the Boltzmann Wealth Model with Reinforcement Learning example in the documentation.
The typical workflow is:
- Define your agent type using
@agent(standard Agents.jl) - Create the model using
ReinforcementLearningABMconstructor - Configure RL settings using
set_rl_config!(or pass config to constructor) - Train agents using
train_model!
Optional: Transfer policies to fresh models using copy_trained_policies!
Construction
ReinforcementLearningABM(AgentType(s), space [, rl_config]; kwargs...)Arguments
AgentType(s): The result of@agentor@multiagentor aUnionof agent types. Any agent type can be used - they don't need to inherit fromRLAgent.space: A subtype ofAbstractSpace. See Space for all available spaces.rl_config: (Optional) AnRLConfigstruct containing RL configuration. Can be set later withset_rl_config!.
Keyword Arguments
Same as StandardABM:
agent_step!: Function for stepping agents. If not provided, will use RL-based stepping when policies are available.model_step!: Function for stepping the model.
RL Configuration
The rl_config argument is an instance of the RLConfig struct with the following fields (which can be given as keywords):
Required Functions
observation_fn(agent::AbstractAgent, model::ReinforcementLearningABM) → Vector{Float32}Function to generate observation vectors for agents from the model state. The purpose of the observation function is to transform from the state space to the observation space (that is almost always much more limited). Said more formally the observation function maps from the markov decision process (the whole ABM) to a partially observable markov decision process. The inputs and outputs are:model: The ReinforcementLearningABM instanceagent: The agent for which to generate observation- Returns:
Vector{Float32}- Flattened feature vector ready for neural network input
reward_fn(agent::AbstractAgent, action::Int, model_before::ABM, model_after::ABM) → Float32Function to calculate scalar rewards based on agent actions and state transitions. Note that often this does not depend on eitheragent, action.agent: The agent that took the givenactionaction: Integer action that was takenmodel_before: Model state before the actionmodel_after: Model state after the action- Returns:
Float32- Scalar reward signal for the action
terminal_fn(env::ReinforcementLearningABM) → BoolFunction to determine if the current episode should terminate.env: The current model state- Returns:
Bool-trueif episode should end,falseto continue
agent_step_fn(agent::AbstractAgent, model::ReinforcementLearningABM, action::Int) → NothingFunction that executes an agent's action in the model.agent: The agent taking the actionmodel: The model containing the agentaction: Integer action to execute- Returns:
Nothing- Modifies agent and model state in-place
Required Action and Observation Spaces
action_spaces::Dict{Type, ActionSpace}Dictionary mapping agent types to their available actions.- Keys: Agent types (e.g.,
MyAgent) - Values: Action spaces (e.g.,
Crux.DiscreteSpace(5)for 5 discrete actions)
- Keys: Agent types (e.g.,
observation_spaces::Dict{Type, ObservationSpace}Dictionary mapping agent types to their observation vector dimensions.- Keys: Agent types (e.g.,
MyAgent) - Values: Observation spaces (e.g.,
Crux.ContinuousSpace((84,), Float32)for 84-dim vectors)
- Keys: Agent types (e.g.,
Other Required Arguments
training_agent_types::Vector{Type}Vector of agent types that should undergo RL training.- Must be a subset of agent types present in the model
- Example:
[MyAgent1, MyAgent2]
Optional Arguments
discount_rates::Dict{Type, Float64}(Optional) Dictionary mapping agent types to their reward discount factors (γ).- Keys: Agent types
- Values: Discount factors between 0.0 and 1.0
- Default: 0.99 for all agent types if not specified
model_init_fn() → ReinforcementLearningABM(Optional) Function to create fresh model instances for episode resets during training.- Returns: New
ReinforcementLearningABMinstance (with agents and anything else required to run the ABM simulation) - If not provided, only the model time is reset to 0 at the start of each episode; all agents and model properties carry over from the previous episode
- Returns: New
Related Functions
set_rl_config!: Set or update RL configuration after model creationtrain_model!: Train agents using reinforcement learningget_trained_policies: Retrieve trained policies from the modelcopy_trained_policies!: Transfer trained policies between modelscreate_policy_network: Create custom policy neural networkscreate_value_network: Create custom value neural networks
See Also
- Boltzmann Wealth Model with Reinforcement Learning: Complete tutorial example
StandardABM: The standard ABM type this extends- Crux.jl documentation: Underlying RL framework
Agents.set_rl_config! — Function
set_rl_config!(model::ReinforcementLearningABM, config) → ReinforcementLearningABMSet the RL configuration for the model.
Arguments
model::ReinforcementLearningABM: The model to configureconfig: Named tuple containing RL configuration parameters
Returns
ReinforcementLearningABM: The configured model
Example
config = (
observation_fn = my_obs_function,
reward_fn = my_reward_function,
# ... other config parameters
)
set_rl_config!(model, config)Agents.create_policy_network — Function
create_policy_network(input_dims, output_dims, action_space_values, hidden_layers=[64, 64], activation=relu) → FunctionCreate a custom policy network with specified architecture.
Arguments
input_dims: Tuple specifying the input dimensionsoutput_dims::Int: Number of output neurons (action space size)action_space_values: The action space values for the policy (e.g. Crux.DiscreteSpace(5).vals)hidden_layers::Vector{Int}: Sizes of hidden layers (default: [64, 64])activation: Activation function (default: relu)
Returns
Function: A function that creates a DiscreteNetwork when called
Agents.create_value_network — Function
create_value_network(input_dims, hidden_layers=[64, 64], activation=relu) → FunctionCreate a custom value network with specified architecture.
Arguments
input_dims: Tuple specifying the input dimensionshidden_layers::Vector{Int}: Sizes of hidden layers (default: [64, 64])activation: Activation function (default: relu)
Returns
Function: A function that creates a ContinuousNetwork when called
Agents.train_model! — Function
train_model!(model::ReinforcementLearningABM
training_mode::Symbol=:sequential; kwargs...)Train the agents in the model using reinforcement learning. Agent types to train are read from model.rl_config[:training_agent_types]. Trained policies are stored in the model and can be accessed via get_trained_policies or copied to other models using copy_trained_policies!. This is the main function for RL training in Agents.jl, supporting both single-agent and multi-agent learning scenarios.
Training Modes
Sequential Training (:sequential)
Agents are trained one at a time in sequence. Each subsequent agent type is trained against the previously trained agents.
Process:
- Train first agent type against random agents
- Train second agent type against the trained first agent
- Continue until all agent types are trained
Simultaneous Training (:simultaneous)
All agent types are trained at the same time with alternating batch updates. This creates a co-evolutionary dynamic where agents adapt to each other simultaneously.
Process:
- Initialize solvers for all agent types
- Alternate training batches between agent types
- Each agent learns against the evolving policies of others
Keyword Arguments
General Training Parameters
max_steps::Int: Maximum number of simulation steps per training episode (default: 50). Episodes terminate when this limit is reached ORterminal_fnreturnstrue.
Sequential Training Parameters
This applies only when training_mode=:sequential:
training_steps::Int: Number of environment steps for training each agent type (default: 50,000).
Simultaneous Training Parameters
These apply only when training_mode=:simultaneous:
n_iterations::Int: Number of alternating training rounds (default: 5)batch_size::Int: Size of training batches for each iteration (default: 10,000)
Algorithm Configuration
solver_params::Dict: Algorithm-specific hyperparameters. Can be:- Global parameters: Applied to all agent types
solver_params = Dict( :ΔN => 200, :log => (period=1000,), ) - Per-agent-type parameters: Different settings for each agent type
solver_params = Dict( Predator => Dict(:ΔN => 100), Prey => Dict(:ΔN => 200) )
- Global parameters: Applied to all agent types
solver_types::Dict{Type, Symbol}: Different RL algorithms for different agent types.solver_types = Dict( FastAgent => :DQN, SmartAgent => :PPO )
Network Architecture Customization
custom_networks::Dict{Type, Dict{Symbol, Function}}: Custom neural network architectures for specific agent types. Each entry maps an agent type to a dictionary containing:value_networkand/or:policy_networkfunctions.custom_networks = Dict( MyAgent => Dict( :value_network => () -> create_value_network((84,), [128, 64]), :policy_network => () -> create_policy_network((84,), 5, action_space, [128, 64]) ) )custom_solvers::Dict{Type, Any}: Pre-configured complete solvers for specific agent types. Bypasses automatic solver creation.custom_solvers = Dict( MyAgent => my_preconfigured_ppo_solver )
Notes
max_stepsis read directly from the RL configuration (model.rl_config[][:max_steps])- Cannot override
max_stepsduring training - it must be set in the RL configuration
Examples
Basic training with custom solver parameters
train_model!(model, MyAgent;
training_steps=10000,
solver_params=Dict(:ΔN => 100, :log => (period=500,)))Multi-Agent Sequential Training
# Train predator and prey sequentially
train_model!(model, [Predator, Prey];
training_mode=:sequential,
training_steps=20000,
solver_params=Dict(
:ΔN => 100,
:log => (period=500,)
))Multi-Agent Simultaneous Training
# Co-evolutionary training
train_model!(model, [PlayerA, PlayerB];
training_mode=:simultaneous,
n_iterations=10,
batch_size=5000,
solver_params=Dict(
PlayerA => Dict(:ΔN => 100),
PlayerB => Dict(:ΔN => 200)
))See Also
ReinforcementLearningABM: The model type used for RL trainingset_rl_config!: Setting up RL configurationcopy_trained_policies!: Copying policies between modelssetup_rl_training: Lower-level training setup- Crux.jl documentation for solver details
Agents.get_trained_policies — Function
get_trained_policies(model::ReinforcementLearningABM) → Dict{Type, Any}Get the dictionary of trained policies for each agent type.
Arguments
model::ReinforcementLearningABM: The model containing trained policies
Returns
Dict{Type, Any}: Dictionary mapping agent types to their trained policies
Example
policies = get_trained_policies(model)
if haskey(policies, MyAgent)
println("MyAgent has a trained policy")
endAgents.copy_trained_policies! — Function
copy_trained_policies!(target_model::ReinforcementLearningABM, source_model::ReinforcementLearningABM) → ReinforcementLearningABMCopy all trained policies from the source model to the target model.
Agent types
Agents.@agent — Macro
@agent struct YourAgentType{X}(AgentTypeToInherit) [<: OptionalSupertype]
extra_property::X
other_extra_property_with_default::Bool = true
const other_extra_const_property::Int
# etc...
endDefine an agent struct which includes all fields that AgentTypeToInherit has, as well as any additional ones the user may provide. The macro supports all syntaxes that the standard Julia mutable struct command allows for, such as const field declaration or default values for some fields. Additionally, the resulting type will always have a keyword constructor defined for it (using @kwdef).
Using @agent is the recommended way to create agent types for Agents.jl.
Structs created with @agent by default subtype AbstractAgent. They cannot subtype each other, as all structs created from @agent are concrete types and AgentTypeToInherit itself is also concrete (only concrete types have fields). If you want YourAgentType to subtype something other than AbstractAgent, use the optional argument OptionalSupertype (which itself must then subtype AbstractAgent).
Usage
The macro @agent has two primary uses:
- To include the mandatory fields for a particular space in your agent struct. In this case you would use one of the minimal agent types as
AnotherAgentType. - A convenient way to include fields from another, already existing struct, thereby establishing a toolkit for "type inheritance" in Julia.
The existing minimal agent types are:
which describe which fields they will contribute to the new type.
Examples
Example without optional hierarchy
Using
@agent struct Person{T}(GridAgent{2})
age::Int
moneyz::T
endwill create an agent appropriate for using with 2-dimensional GridSpace
mutable struct Person{T} <: AbstractAgent
id::Int
pos::NTuple{2, Int}
age::Int
moneyz::T
endNotice that you can also use default values for some fields, in this case you will need to specify the field names with the non-default values
@agent struct Person2{T}(GridAgent{2})
age::Int = 30
moneyz::T
end
# default age value
Person2(id = 1, pos = (1, 1), moneyz = 2000)
# new age value
Person2(1, (1, 1), 40, 2000)Example with optional hierarchy
An alternative way to make the above structs, that also establishes a user-specific subtyping hierarchy would be to do:
abstract type AbstractHuman <: AbstractAgent end
@agent struct Worker(GridAgent{2}) <: AbstractHuman
age::Int
moneyz::Float64
end
@agent struct Fisher(Worker) <: AbstractHuman
fish_per_day::Float64
endwhich would now make both Fisher and Worker subtypes of AbstractHuman.
julia> supertypes(Fisher)
(Fisher, AbstractHuman, AbstractAgent, Any)
julia> supertypes(Worker)
(Worker, AbstractHuman, AbstractAgent, Any)Note that Fisher will not be a subtype of Worker although Fisher has inherited the fields from Worker.
Example highlighting problems with parametric types
Notice that in Julia parametric types are union types. Hence, the following cannot be used:
@agent struct Dummy{T}(GridAgent{2})
moneyz::T
end
@agent struct Fisherino{T}(Dummy{T})
fish_per_day::T
endYou will get an error in the definition of Fisherino, because the fields of Dummy{T} cannot be obtained, because it is a union type. Same with using Dummy. You can only use Dummy{Float64}.
Example with common dispatch and no subtyping
It may be that you do not even need to create a subtyping relation if you want to utilize multiple dispatch. Consider the example:
@agent struct CommonTraits(GridAgent{2})
age::Int
speed::Int
energy::Int
endand then two more structs are made from these traits:
@agent struct Bird(CommonTraits)
height::Float64
end
@agent struct Rabbit(CommonTraits)
underground::Bool
endIf you wanted a function that dispatches to both Rabbit, Bird, you only have to define:
Animal = Union{Bird, Rabbit}
f(x::Animal) = ... # uses `CommonTraits` fieldsHowever, it should also be said, that there is no real reason here to explicitly type-annotate x::Animal in f. Don't annotate any type. Annotating a type only becomes useful if there are at least two "abstract" groups, like Animal, Person. Then it would make sense to define
Person = Union{Fisher, Baker}
f(x::Animal) = ... # uses `CommonTraits` fields
f(x::Person) = ... # uses fields that all "persons" haveAgents.jl has a convenience function add_agent! to create and add agents to the model automatically. In the case you want to create some agents by yourself you can use a constructor accepting the model as first argument so that internal fields, such as the id, are set automatically
model = StandardABM(GridAgent{2}, GridSpace((10,10)))
a = GridAgent{2}(model, (3,4)) # the id is set automaticallyAgents.@multiagent — Macro
@multiagent YourAgentType(AgentTypesToMerge...) [<: OptionalSupertype]Define multiple agent "subtypes", which are variants of a unique type YourAgentType. This means that all "subtypes" are enclosed in the overarching type. Then, You cannot distinguish them on the basis of typeof, but need to use instead the variantof function. The allvariants function for a convenient way to obtain all variants types.
See the Tutorial or the performance comparison versus Union types for why it is often better to use @multiagent than making multiple agent types.
@multiagent is based on LightSumTypes.jl.
Examples
Let's say you have this definition:
@agent struct Wolf
energy::Float64 = 0.5
ground_speed::Float64
const fur_color::Symbol
end
@agent struct Hawk{T}
energy::Float64 = 0.1
ground_speed::Float64
flight_speed::T
end
@multiagent Animal(Wolf, Hawk{Float64})Then you can create Wolf and Hawk agents like so
hawk_1 = (Animal ∘ Hawk)(1, (1, 1), 1.0, 2.0, 3)
hawk_2 = (Animal ∘ Hawk)(; id = 2, pos = (1, 2), ground_speed = 2.3, flight_speed = 2)
wolf_1 = (Animal ∘ Wolf)(3, (2, 2), 2.0, 3.0, :black)
wolf_2 = (Animal ∘ Wolf)(; id = 4, pos = (2, 1), ground_speed = 2.0, fur_color = :white)The way to retrieve the variant of the agent is through the function variantof e.g.
variantof(hawk_1) # Hawk
variantof(wolf_2) # WolfYou can also access the enclosed variant instance with the variant function
variant(hawk_1) # Hawk(1, (1, 1), 1.0, 2.0, 3.0)
variant(wolf_1) # Wolf(3, (2, 2), 2.0, 3.0, :black)See the Rabbit-Fox-Hawk example to see how to use this macro in a model.
Agents.AbstractAgent — Type
YourAgentType <: AbstractAgentAgents participating in Agents.jl simulations are instances of user-defined types that are subtypes of AbstractAgent.
Your agent type(s) must have the id::Int field as first field. If any space is used (see Available spaces), a pos field of appropriate type is also mandatory. The core model structure, and each space, may also require additional fields that may, or may not, be communicated as part of the public API.
The @agent macro ensures that all of these constrains are in place and hence it is the the only supported way to create agent types.
Agents.SoAType — Type
SoAType{A} <: AbstractAgentWrapper type for agents of type A in a model containing a StructVector container.
This is needed for specializing signatures involving A e.g. instead of writing agent_step!(agent::A, model), in the case of a model with a StructVector container, you should write agent_step!(agent::SoaType{A}, model) since model[id] is a SoaType{A}.
Minimal agent types
The @agent macro can be used to define new agent types from the minimal agent types that are listed below:
Agents.NoSpaceAgent — Type
NoSpaceAgent <: AbstractAgentThe minimal agent struct for usage with nothing as space (i.e., no space). It has the field id::Int, and potentially other internal fields that are not documented as part of the public API. See also @agent.
Agents.GraphAgent — Type
GraphAgent <: AbstractAgentThe minimal agent struct for usage with GraphSpace. It has an additional pos::Int field. See also @agent.
Agents.GridAgent — Type
GridAgent{D} <: AbstractAgentThe minimal agent struct for usage with D-dimensional GridSpace. It has an additional pos::NTuple{D,Int} field. See also @agent.
Agents.ContinuousAgent — Type
ContinuousAgent{D,T} <: AbstractAgentThe minimal agent struct for usage with D-dimensional ContinuousSpace. It has the additional fields pos::SVector{D,T}, vel::SVector{D,T} where T can be any AbstractFloat type. See also @agent.
Agents.OSMAgent — Type
OSMAgent <: AbstractAgentThe minimal agent struct for usage with OpenStreetMapSpace. It has an additional field pos::Tuple{Int,Int,Float64}. See also @agent.
Agent/model retrieval and access
Base.getindex — Method
model[id]
getindex(model::ABM, id::Int)Return an agent given its ID.
Base.getproperty — Method
model.prop
getproperty(model::ABM, :prop)Return a property with name :prop from the current model, assuming the model properties are either a dictionary with key type Symbol or a Julia struct. For example, if a model has the set of properties Dict(:weight => 5, :current => false), retrieving these values can be obtained via model.weight or model.current.
Agents.random_id — Function
random_id(model) → idReturn a random id from the model.
Agents.random_agent — Function
random_agent(model) → agentReturn a random agent from the model.
random_agent(model, condition; optimistic=true, alloc = false) → agentReturn a random agent from the model that satisfies condition(agent) == true. The function generates a random permutation of agent IDs and iterates through them. If no agent satisfies the condition, nothing is returned instead.
Keywords
optimistic = true changes the algorithm used to be non-allocating but potentially more variable in performance. This should be faster if the condition is true for a large proportion of the population (for example if the agents are split into groups).
alloc can be used to employ a different fallback strategy in case the optimistic version doesn't find any agent satisfying the condition: if the filtering condition is expensive an allocating fallback can be more performant.
Agents.nagents — Function
nagents(model::ABM)Return the number of agents in the model.
Agents.allagents — Function
allagents(model)Return an iterator over all agents of the model.
Agents.allids — Function
allids(model)Return an iterator over all agent IDs of the model.
Agents.hasid — Function
hasid(model, id::Int) → true/false
hasid(model, agent::AbstractAgent) → true/falseReturn true if the model has an agent with given id or has the given agent.
Agents.abmproperties — Function
abmproperties(model::ABM)Return the properties container stored in the model.
Agents.abmrng — Function
abmrng(model::ABM)Return the random number generator stored in the model.
Agents.abmscheduler — Function
abmscheduler(model::ABM)Return the default scheduler stored in model.
Agents.abmspace — Function
abmspace(model::ABM)Return the space instance stored in the model.
Agents.abmtime — Function
abmtime(model::ABM)Return the current time of the model. All models are initialized at time 0.
abmtime(model::AgentBasedModel)Return the current time of the model. All models are initialized at time 0.
Agents.abmevents — Function
abmevents(model::EventQueueABM)Return all possible events stored in the model.
Available spaces
Here we list the spaces that are available "out of the box" from Agents.jl. To create your own, see the developer documentation on creating a new space type.
Discrete spaces
Agents.GraphSpace — Type
GraphSpace(graph::AbstractGraph)Create a GraphSpace instance that is underlined by an arbitrary graph from Graphs.jl. GraphSpace represents a space where each node (i.e. position) of a graph can hold an arbitrary amount of agents, and each agent can move between the nodes of the graph. The position type for this space is Int, use GraphAgent for convenience.
GraphSpace inherits from DiscreteSpace and all functions for DiscreteSpace are available. On top of that, Graphs.nv and Graphs.ne can be used in a model with a GraphSpace to obtain the number of nodes or edges in the graph. The underlying graph can be altered using add_vertex! and rem_vertex!.
An example using GraphSpace is SIR model for the spread of COVID-19. To visualize this space with abmplot you need to be using GraphMakie.
GraphSpace is not intended for "social-network-like" agent based modelling, where each agent is equivalent with a node of a network/graph and the graph represents connections between agents. Rather, GraphSpace is suitable for when the coordinates of spatial locations are not as important as the connections between them. GraphSpace is suited for e.g., modelling cities where each can host many agents and agents may move between cities.
If you want to make a "social-network" like simulation, see the integration with Graphs.jl example. Likely you won't need a space structure at all!
Distance specification
In functions like nearby_ids, distance for GraphSpace means the degree of neighbors in the graph (thus distance is always an integer). For example, for r=2 includes first and second degree neighbors. For 0 distance, the search occurs only on the origin node.
In functions like nearby_ids the keyword neighbor_type=:default can be used to select differing neighbors depending on the underlying graph directionality type.
:defaultreturns neighbors of a vertex (position). If graph is directed, this is equivalent to:out. For undirected graphs, all options are equivalent to:out.:allreturns both:inand:outneighbors.:inreturns incoming vertex neighbors.:outreturns outgoing vertex neighbors.
Agents.GridSpace — Type
GridSpace(d::NTuple{D, Int}; periodic = true, metric = :chebyshev)Create a GridSpace that has size given by the tuple d, having D ≥ 1 dimensions. Optionally decide whether the space will be periodic and what will be the distance metric. The position type for this space is NTuple{D, Int}, use GridAgent for convenience. Valid positions have indices in the range 1:d[i] for the i-th dimension.
An example using GridSpace is Schelling's segregation model.
Distance specification
The typical terminology when searching neighbors in agent based modelling is "Von Neumann" neighborhood or "Moore" neighborhoods. However, because Agents.jl provides a much more powerful infrastructure for finding neighbors, both in arbitrary dimensions but also of arbitrary neighborhood size, this established terminology is no longer appropriate. Instead, distances that define neighborhoods are specified according to a proper metric space, that is both well defined for any distance, and applicable to any dimensionality.
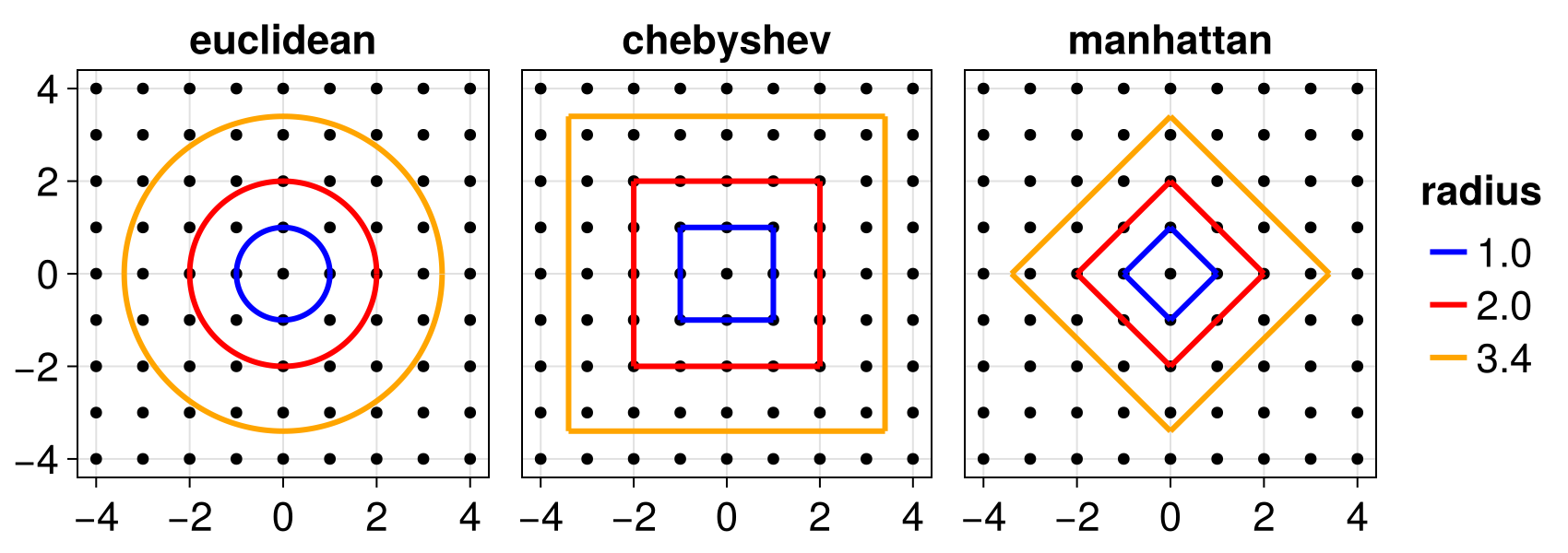
The allowed metrics are (and see docs online for a plotted example):
:chebyshevmetric means that ther-neighborhood of a position are all positions within the hypercube having side length of2*floor(r)and being centered in the origin position. This is similar to "Moore" forr = 1and two dimensions.:manhattanmetric means that ther-neighborhood of a position are all positions whose cartesian indices have Manhattan distance≤ rfrom the cartesian index of the origin position. This similar to "Von Neumann" forr = 1and two dimensions.:euclideanmetric means that ther-neighborhood of a position are all positions whose cartesian indices have Euclidean distance≤ rfrom the cartesian index of the origin position.
Advanced dimension-dependent distances in Chebyshev metric
If metric = :chebyshev, some advanced specification of distances is allowed when providing r to functions like nearby_ids.
r::NTuple{D,Int}such asr = (5, 2). This would mean a distance of 5 in the first dimension and 2 in the second. This can be useful when different coordinates in the space need to be searched with different ranges, e.g., if the space corresponds to a full building, with the third dimension the floor number.r::Vector{Tuple{Int,UnitRange{Int}}}such asr = [(1, -1:1), (3, 1:2)]. This allows explicitly specifying the difference between position indices in each specified dimension. The exampler = [(1, -1:1), (3, 1:2)]when given to e.g.,nearby_ids, would search dimension 1 one step of either side of the current position (as well as the current position since0 ∈ -1:1) and would search the third dimension one and two positions above current. Unspecified dimensions (like the second in this example) are searched throughout all their possible ranges.
See the Battle Royale example for usage of this advanced specification of dimension-dependent distances where one dimension is used as a categorical one.
Agents.GridSpaceSingle — Type
GridSpaceSingle(d::NTuple{D, Int}; periodic = true, metric = :chebyshev)This is a specialized version of GridSpace that allows only one agent per position, and utilizes this knowledge to offer significant performance gains versus GridSpace.
This space reserves agent ID = 0 for internal usage. Agents should be initialized with non-zero IDs, either positive or negative. This is not checked internally.
All arguments and keywords behave exactly as in GridSpace.
Here is a specification of how the metrics look like:
Continuous spaces
Agents.ContinuousSpace — Type
ContinuousSpace(extent::NTuple{D, <:Real}; kwargs...)Create a D-dimensional ContinuousSpace in range 0 to (but not including) extent. Your agent positions (field pos) must be of type SVector{D, <:Real}, and it is strongly recommend that agents also have a field vel::SVector{D, <:Real} to use in conjunction with move_agent!. Use ContinuousAgent for convenience.
ContinuousSpace is a representation of agent dynamics on a continuous medium where agent position, orientation, and speed, are true floats. In addition, support is provided for representing spatial properties in a model that contains a ContinuousSpace. Spatial properties (which typically are contained in the model properties) can either be functions of the position vector, f(pos) = value, or AbstractArrays, representing discretizations of spatial data that may not be available in analytic form. In the latter case, the position is automatically mapped into the discretization represented by the array. Use get_spatial_property to access spatial properties in conjunction with ContinuousSpace.
See also ContinuousSpace exclusives on the online docs for more functionality. An example using continuous space is the Flocking model.
Distance specification
Distances specified by r in functions like nearby_ids are always based on the Euclidean distance between two points in ContinuousSpace.
In ContinuousSpace nearby_* searches are accelerated using a grid system; see discussion around the keyword spacing below. By default, nearby_* has the keyword search set to :approximate, which means that it doesn't do an exact search, but can be a possible overestimation, including agent IDs whose distance slightly exceeds r with "slightly" being as much as spacing. If you want exact searches set the keyword search to :exact in nearby_*.
Keywords
periodic = true: Whether the space is periodic or not. If set tofalsean error will occur if an agent's position exceeds the boundary.spacing::Real = minimum(extent)/20: Configures an internal compartment spacing that is used to accelerate nearest neighbor searches likenearby_ids. The compartments are actually a full instance ofGridSpacein which agents move. All dimensions inextentmust be completely divisible byspacing. There is no best choice for the value ofspacingand if you need optimal performance it's advised to set up a benchmark over a range of choices. The finer the spacing, the faster and more accurate the inexact version ofnearby_idsbecomes. However, a finer spacing also means slowermove_agent!, as agents change compartments more often.update_vel!: A function,update_vel!(agent, model)that updates the agent's velocity before the agent has been moved, seemove_agent!. You can of course change the agents' velocities during the agent interaction, theupdate_vel!functionality targets spatial force fields acting on the agents individually (e.g. some magnetic field). If you useupdate_vel!, the agent type must have a fieldvel::SVector{D, <:Real}.
Agents.OpenStreetMapSpace — Type
OpenStreetMapSpace(path::AbstractString; kwargs...)Create a space residing on the Open Street Map (OSM) file provided via path. This space represents the underlying map as a continuous entity choosing accuracy over performance. The map is represented as a graph, consisting of nodes connected by edges. Nodes are not necessarily intersections, and there may be multiple nodes on a road joining two intersections. Agents move along the available roads of the map using routing, see below.
An example of using Open Street Map spaces can be found in the Zombie Outbreak tutorial.
The OSMAgent
The base properties for an agent residing on an OSMSpace are as follows:
mutable struct Agent <: AbstractAgent
id::Int
pos::Tuple{Int,Int,Float64}
endwhich are captured by the OSMAgent basic agent type. Current position tuple is represented as (first intersection index, second intersection index, distance travelled). The indices are the indices of the nodes of the graph that internally represents the map. Functions like OSM.nearest_node or OSM.nearest_road can help find those node indices from a (lon, lat) real world coordinate. The distance travelled is in the units of weight_type. This ensures that the map is a continuous kind of space, as an agent can truly be at any possible point on an existing road.
Obtaining map files
Maps files can be downloaded using the functions provided by LightOSM.jl. The function you'd typically want to use is download_osm_network:
LightOSM.download_osm_network(
:place_name;
place_name = "London",
save_to_file_location = "london.json"
)The length of an edge between two nodes is specified in the units of the map's weight_type as listed in the documentation for LightOSM.OSMGraph. The possible weight_types are:
:distance: The distance in kilometers of an edge:time: The time in hours to travel along an edge at the maximum speed allowed on that road:lane_efficiency: Time scaled by number of lanes
The default weight_type used is :distance.
All kwargs are propagated to LightOSM.graph_from_file.
Routing with OSM
You can use OSM.plan_route! or OSM.plan_random_route! with open street maps! To actually move along a planned route use OSM.move_along_route!.
Additional functionality
Additional functionality specific to Open Street Map spaces is contained in the submodule OSM.
Adding agents
Agents.add_agent! — Function
add_agent!(agent::AbstractAgent [, pos], model::ABM) → agentAdd the agent to the model in the given position. If pos is not given, the agent is added to a random position. The agent's position is always updated to match position, and therefore for add_agent! the position of the agent is meaningless. Use add_agent_own_pos! to use the agent's position. The type of pos must match the underlying space position type.
add_agent!([pos,] model::ABM, args...) → newagent
add_agent!([pos,] model::ABM; kwargs...) → newagentUse one of these two versions to create and add a new agent to the model using the constructor of the agent type of the model. Optionally provide a position to add the agent to as first argument, which must match the space position type.
This function takes care of setting the agent id and position. The extra provided args... or kwargs... are propagated to other fields of the agent constructor (see example below). Mixing args... and kwargs... is not possible, only one of the two can be used to set the fields.
add_agent!([pos,] A::Type, model::ABM, args...) → newagent
add_agent!([pos,] A::Type, model::ABM; kwargs...) → newagentUse one of these two versions for mixed agent models, with A the agent type you wish to create, because it is otherwise not possible to deduce a constructor for A.
Example
using Agents
@agent struct Agent(GraphAgent)
w::Float64 = 0.1
k::Bool = false
end
model = StandardABM(Agent, GraphSpace(complete_digraph(5)))
add_agent!(model, 1, 0.5, true) # incorrect: id/pos is set internally
add_agent!(model, 0.5, true) # correct: w becomes 0.5
add_agent!(5, model, 0.5, true) # add at position 5, w becomes 0.5
add_agent!(model; w = 0.5) # use keywords: w becomes 0.5, k becomes falseAgents.add_agent_own_pos! — Function
add_agent_own_pos!(agent::AbstractAgent, model::ABM) → agentAdd the agent to the model at the agent's own position.
Agents.replicate! — Function
replicate!(agent::AbstractAgent model; kwargs...)Add a new agent to the model copying the values of the fields of the given agent. With the kwargs it is possible to override the values by specifying new ones for some fields, including the pos field. The id field is set to a new one automatically.
Return the new agent instance.
Example
using Agents
@agent struct A(GridAgent{2})
k::Float64
w::Float64
end
model = StandardABM(A, GridSpace((5, 5)))
a = A(1, (2, 2), 0.5, 0.5)
b = replicate!(a, model; w = 0.8)Agents.random_position — Function
random_position(model) → posReturn a random position in the model's space (always with appropriate Type).
Moving agents
Agents.move_agent! — Function
move_agent!(agent [, pos], model::ABM) → agentMove agent to the given position, or to a random one if a position is not given. pos must have the appropriate position type depending on the space type.
The agent's position is updated to match pos after the move.
move_agent!(agent, model::ABM{<:ContinuousSpace}, dt::Real)Propagate the agent forwards one step according to its velocity, after updating the agent's velocity (if configured using update_vel!, see ContinuousSpace).
For this continuous space version of move_agent!, the "time evolution" is a trivial Euler scheme with dt the step size, i.e. the agent position is updated as agent.pos += agent.vel * dt.
Unlike move_agent!(agent, [pos,] model), this function respects the space size. For non-periodic spaces, agents will walk up to, but not reach, the space extent. For periodic spaces movement properly wraps around the extent.
Agents.walk! — Function
walk!(agent, direction::NTuple, model::ABM{<:AbstractGridSpace}; ifempty = true)
walk!(agent, direction::SVector, model::ABM{<:ContinuousSpace})Move agent in the given direction respecting periodic boundary conditions. For non-periodic spaces, agents will walk to, but not exceed the boundary value. Available for both AbstractGridSpace and ContinuousSpaces.
The type of direction must be the same as the space position. AbstractGridSpace asks for Int tuples, and ContinuousSpace for Float64 static vectors, describing the walk distance in each direction. direction = (2, -3) is an example of a valid direction on a AbstractGridSpace, which moves the agent to the right 2 positions and down 3 positions. Agent velocity is ignored for this operation in ContinuousSpace.
Keywords
ifemptywill check that the target position is unoccupied and only move if that's true. Available only onAbstractGridSpace.
Example usage in Battle Royale.
Agents.randomwalk! — Function
randomwalk!(agent, model::ABM{<:AbstractGridSpace}, r::Real = 1; kwargs...)Move agent for a distance r in a random direction respecting boundary conditions and space metric. For Chebyshev and Manhattan metric, the step size r is rounded to floor(Int,r); for Euclidean metric in a GridSpace, random walks are ill defined and hence not supported.
For example, for Chebyshev metric and r=1, this will move the agent with equal probability to any of the 8 surrounding cells. For Manhattan metric, it will move to any of the 4 surrounding cells.
Keywords
ifemptywill check that the target position is unoccupied and only move if that's true. So ififemptyis true, this can result in the agent not moving even if there are available positions. By default this is true, set it to false if different agents can occupy the same position. In aGridSpaceSingle, agents cannot overlap anyways and this keyword has no effect.force_motionhas an effect only ififemptyis true or the space is aGridSpaceSingle. If set to true, the search for the random walk will be done only on the empty positions, so in this case the agent will always move if there is at least one empty position to choose from. By default this is false.
randomwalk!(agent, model::ABM{<:ContinuousSpace} [, r];
[polar=Uniform(-π,π), azimuthal=Arccos(-1,1)]
)Re-orient and move agent for a distance r in a random direction respecting space boundary conditions. By default r = norm(agent.vel).
The ContinuousSpace version is slightly different than the grid space. Here, the agent's velocity is updated by the random vector generated for the random walk.
Uniform/isotropic random walks are supported in any number of dimensions while an angles distribution can be specified for 2D and 3D random walks. In this case, the velocity vector is rotated using random angles given by the distributions for polar (2D and 3D) and azimuthal (3D only) angles, and scaled to have measure r. After the re-orientation the agent is moved for r in the new direction.
Anything that supports rand can be used as an angle distribution instead. This can be useful to create correlated random walks.
Agents.get_direction — Function
get_direction(from, to, model::ABM)Return the direction vector from the position from to position to taking into account periodicity of the space.
Movement with paths
For OpenStreetMapSpace, and GridSpace/ContinuousSpace using Pathfinding, it is possible to move along planned routes. See the functions plan_route! plan_best_route! move_along_route! of the respective submodules.
Removing agents
Agents.remove_agent! — Function
remove_agent!(agent::AbstractAgent, model::ABM)
remove_agent!(id::Int, model::ABM)Remove an agent from the model.
Pathfinding.remove_agent!(agent, model, pathfinder)The same as remove_agent!(agent, model), but also removes the agent's path data from pathfinder.
Agents.remove_all! — Function
remove_all!(model::ABM)Remove all the agents of the model.
remove_all!(model::ABM, n::Int)Remove the agents whose IDs are larger than n.
remove_all!(model::ABM, IDs)Remove the agents with the given IDs.
remove_all!(model::ABM, f::Function)Remove all agents where the function f(agent) returns true.
Agents.sample! — Function
sample!(model::ABM, n [, weight]; kwargs...)Replace the agents of the model with a random sample of the current agents with size n.
Optionally, provide a weight: Symbol (agent field) or function (input agent out put number) to weight the sampling. This means that the higher the weight of the agent, the higher the probability that this agent will be chosen in the new sampling.
Keywords
replace = true: whether sampling is performed with replacement, i.e. all agents can
be chosen more than once.
Example usage in Wright-Fisher model of evolution.
Space utility functions
Agents.normalize_position — Function
normalize_position(pos, model::ABM{<:Union{AbstractGridSpace,ContinuousSpace}})Return the position pos normalized for the extents of the space of the given model. For periodic spaces, this wraps the position along each dimension, while for non-periodic spaces this clamps the position to the space extent.
Agents.spacesize — Function
spacesize(model::ABM)Return the size of the model's space. Works for GridSpace, GridSpaceSingle and ContinuousSpace.
DiscreteSpace exclusives
Agents.positions — Function
positions(model::ABM{<:DiscreteSpace}) → nsReturn an iterator over all positions of a model with a discrete space.
positions(model::ABM{<:DiscreteSpace}, by::Symbol) → nsReturn all positions of a model with a discrete space, sorting them using the argument by which can be:
:random- randomly sorted:population- positions are sorted depending on how many agents they accommodate. The more populated positions are first.
Agents.npositions — Function
npositions(model::ABM{<:DiscreteSpace})Return the number of positions of a model with a discrete space.
Agents.ids_in_position — Function
ids_in_position(position, model::ABM{<:DiscreteSpace})
ids_in_position(agent, model::ABM{<:DiscreteSpace})Return the ids of agents in the position corresponding to position or position of agent.
Agents.id_in_position — Function
id_in_position(pos, model::ABM{<:GridSpaceSingle}) → idReturn the agent ID in the given position. This will be 0 if there is no agent in this position.
This is similar to ids_in_position, but specialized for GridSpaceSingle. See also isempty.
Agents.agents_in_position — Function
agents_in_position(position, model::ABM{<:DiscreteSpace})
agents_in_position(agent, model::ABM{<:DiscreteSpace})Return an iterable of the agents in position, or in the position ofagent`.
Agents.random_id_in_position — Function
random_id_in_position(pos, model::ABM, [f, alloc = false]) → idReturn a random id in the position specified in pos.
A filter function f(id) can be passed so that to restrict the sampling on only those agents for which the function returns true. The argument alloc can be used if the filtering condition is expensive since in this case the allocating version can be more performant. nothing is returned if no nearby position satisfies f.
Use random_nearby_id instead to return the id of a random agent near the position of a given agent.
Agents.random_agent_in_position — Function
random_agent_in_position(pos, model::ABM, [f, alloc = false]) → agentReturn a random agent in the position specified in pos.
A filter function f(agent) can be passed so that to restrict the sampling on only those agents for which the function returns true. The argument alloc can be used if the filtering condition is expensive since in this case the allocating version can be more performant. nothing is returned if no nearby position satisfies f.
Use random_nearby_agent instead to return a random agent near the position of a given agent.
Agents.fill_space! — Function
fill_space!([A ,] model::ABM{<:DiscreteSpace,A}, args...)
fill_space!([A ,] model::ABM{<:DiscreteSpace,A}; kwargs...)
fill_space!([A ,] model::ABM{<:DiscreteSpace,A}, f::Function)Add one agent to each position in the model's space. Similarly with add_agent!, fill_space creates the necessary agents and adds them to the model. Like in add_agent! you may use either args... or kwargs... to set the remaining properties of the agent.
Alternatively, you may use the third version. If instead of args... a function f is provided, then args = f(pos) is the result of applying f where pos is each position (tuple for grid, integer index for graph). Hence, in this case f must create all other agent properties besides mandatory id, pos.
An optional first argument is an agent type to be created, and targets mixed agent models where the agent constructor cannot be deduced (since it is a union).
Agents.has_empty_positions — Function
has_empty_positions(model::ABM{<:DiscreteSpace})Return true if there are any positions in the model without agents.
Agents.empty_positions — Function
empty_positions(model)Return a list of positions that currently have no agents on them.
Agents.empty_nearby_positions — Function
empty_nearby_positions(pos, model::ABM{<:DiscreteSpace}, r = 1; kwargs...)
empty_nearby_positions(agent, model::ABM{<:DiscreteSpace}, r = 1; kwargs...)Return an iterable of all empty positions within radius r from the given position or the given agent.
The value of r and possible keywords operate identically to nearby_positions.
Agents.random_empty — Function
random_empty(model::ABM{<:DiscreteSpace})Return a random position without any agents, or nothing if no such positions exist.
Agents.add_agent_single! — Function
add_agent_single!(agent, model::ABM{<:DiscreteSpace}) → agentAdd the agent to a random position in the space while respecting a maximum of one agent per position, updating the agent's position to the new one.
This function does nothing if there aren't any empty positions.
add_agent_single!(model::ABM{<:DiscreteSpace}, properties...; kwargs...)Same as add_agent!(model, properties...; kwargs...) but ensures that it adds an agent into a position with no other agents (does nothing if no such position exists).
add_agent_single!(A, model::ABM{<:DiscreteSpace}, properties...; kwargs...)Same as add_agent!(A, model, properties...; kwargs...) but ensures that it adds an agent into a position with no other agents (does nothing if no such position exists).
Agents.move_agent_single! — Function
move_agent_single!(agent, model::ABM{<:DiscreteSpace}; cutoff) → agentMove agent to a random position while respecting a maximum of one agent per position. If there are no empty positions, the agent won't move.
The keyword cutoff = 0.998 is sent to random_empty.
Agents.swap_agents! — Function
swap_agents!(agent1, agent2, model::ABM{<:DiscreteSpace})Swap the given agent's positions, moving each of them to the position of the other agent.
GraphSpace exclusives
Graphs.SimpleGraphs.add_edge! — Function
add_edge!(model::ABM{<:GraphSpace}, args...; kwargs...)Add a new edge (relationship between two positions) to the graph. Returns a boolean, true if the operation was successful.
args and kwargs are directly passed to the add_edge! dispatch that acts the underlying graph type.
Graphs.SimpleGraphs.rem_edge! — Function
rem_edge!(model::ABM{<:GraphSpace}, n, m)Remove an edge (relationship between two positions) from the graph. Returns a boolean, true if the operation was successful.
Graphs.SimpleGraphs.add_vertex! — Function
add_vertex!(model::ABM{<:GraphSpace})Add a new node (i.e. possible position) to the model's graph and return it. You can connect this new node with existing ones using add_edge!.
Graphs.SimpleGraphs.rem_vertex! — Function
rem_vertex!(model::ABM{<:GraphSpace}, n::Int)Remove node (i.e. position) n from the model's graph. All agents in that node are removed from the model.
Warning: Graphs.jl (and thus Agents.jl) swaps the index of the last node with that of the one to be removed, while every other node remains as is. This means that when doing rem_vertex!(n, model) the last node becomes the n-th node while the previous n-th node (and all its edges and agents) are deleted.
ContinuousSpace exclusives
Agents.nearest_neighbor — Function
nearest_neighbor(agent, model::ABM{<:ContinuousSpace}, r) → nearestReturn the agent that has the closest distance to given agent. Return nothing if no agent is within distance r.
Agents.get_spatial_property — Function
get_spatial_property(pos, property::AbstractArray, model::ABM)Convert the continuous agent position into an appropriate index of property, which represents some discretization of a spatial field over a ContinuousSpace. Then, return property[index]. To get the index directly, for e.g. mutating the property in-place, use get_spatial_index.
get_spatial_property(pos, property::Function, model::ABM)Literally equivalent with property(pos, model), provided just for syntax consistency.
Agents.get_spatial_index — Function
get_spatial_index(pos, property::AbstractArray, model::ABM)Convert the continuous agent position into an appropriate index of property, which represents some discretization of a spatial field over a ContinuousSpace.
The dimensionality of property and the continuous space do not have to match. If property has lower dimensionality than the space (e.g. representing some surface property in 3D space) then the front dimensions of pos will be used to index.
Agents.interacting_pairs — Function
interacting_pairs(model, r, method; scheduler = abmscheduler(model)) → piterReturn an iterator that yields unique pairs of agents (a, b) that are close neighbors to each other, within some interaction radius r.
This function is usefully combined with model_step!, when one wants to perform some pairwise interaction across all pairs of close agents once (and does not want to trigger the event twice, both with a and with b, which would be unavoidable when using agent_step!). This means, that if a pair (a, b) exists, the pair (b, a) is not included in the iterator!
Use piter.pairs to get a vector of pair IDs from the iterator.
The argument method provides three pairing scenarios
:all: return every pair of agents that are within radiusrof each other, not only the nearest ones.:nearest: agents are only paired with their true nearest neighbor (existing within radiusr). Each agent can only belong to one pair, therefore if two agents share the same nearest neighbor only one of them (sorted by distance, then by next id inscheduler) will be paired.:types: For mixed agent models only. Return every pair of agents within radiusr(similar to:all), only capturing pairs of differing types. For example, a model ofUnion{Sheep,Wolf}will only return pairs of(Sheep, Wolf). In the case of multiple agent types, e.g.Union{Sheep, Wolf, Grass}, skipping pairings that involveGrass, can be achieved by aschedulerthat doesn't scheduleGrasstypes, i.e.:scheduler(model) = (a.id for a in allagents(model) if !(a isa Grass)).
The following keywords can be used:
scheduler = abmscheduler(model), which schedulers the agents during iteration for finding pairs. Especially in the:nearestcase, this is important, as different sequencing for the agents may give different results (ifbis the nearest agent fora, butais not the nearest agent forb, whether you get the pair(a, b)or not depends on whetherawas scheduler first or not).search = :exactdecides how to find nearby IDs in the:all, :typescases. Must be:exactor:approximate.
Example usage in Bacterial Growth model.
Notice that in most applications that interacting_pairs is useful, there is significant (10x-100x) performance gain to be made by integrating with CellListMap.jl. Checkout the Integrating Agents.jl with CellListMap.jl integration example for how to do this.
Agents.elastic_collision! — Function
elastic_collision!(a, b, f = nothing) → happenedResolve a (hypothetical) elastic collision between the two agents a, b. They are assumed to be disks of equal size touching tangentially. Their velocities (field vel) are adjusted for an elastic collision happening between them. This function works only for two dimensions. Notice that collision only happens if both disks face each other, to avoid collision-after-collision.
If f is a Symbol, then the agent property f, e.g. :mass, is taken as a mass to weight the two agents for the collision. By default no weighting happens.
One of the two agents can have infinite "mass", and then acts as an immovable object that specularly reflects the other agent. In this case momentum is not conserved, but kinetic energy is still conserved.
Return a boolean encoding whether the collision happened.
Example usage in Continuous space social distancing.
Agents.chebyshev_distance — Function
chebyshev_distance(a, b, model::ABM)Return the Chebyshev distance between a and b (either agents or agent positions), respecting periodic boundary conditions (if in use). Works with any space where it makes sense: currently AbstractGridSpace and ContinuousSpace.
Agents.euclidean_distance — Function
euclidean_distance(a, b, model::ABM)Return the euclidean distance between a and b (either agents or agent positions), respecting periodic boundary conditions (if in use). Works with any space where it makes sense: currently AbstractGridSpace and ContinuousSpace.
Example usage in the Flocking model.
Agents.manhattan_distance — Function
manhattan_distance(a, b, model::ABM)Return the manhattan distance between a and b (either agents or agent positions), respecting periodic boundary conditions (if in use). Works with any space where it makes sense: currently AbstractGridSpace and ContinuousSpace.
OpenStreetMapSpace exclusives
Agents.OSM — Module
Agents.OSMExtension module for functionality related to OpenStreetMapSpace. See the docstring of the space for more info.
Agents.OSM.test_map — Function
OSM.test_map()Download a small test map of Göttingen as an artifact. Return a path to the downloaded file.
Using this map requires network_type = :none to be passed as a keyword to OpenStreetMapSpace. The unit of distance used for this map is :time.
Agents.OSM.random_road_position — Function
OSM.random_road_position(model::ABM{<:OpenStreetMapSpace})Similar to random_position, but rather than providing only intersections, this method returns a location somewhere on a road heading in a random direction.
Agents.OSM.plan_route! — Function
OSM.plan_route!(agent, dest, model::ABM{<:OpenStreetMapSpace}; kw...)Plan a route from the current position of agent to the location specified in dest, which can be an intersection or a point on a road. Overwrite any existing route.
Return true if a path to dest exists, and hence the route planning was successful. Otherwise return false. When dest is an invalid position, i.e. if it contains node indices that are not in the graph, or if the distance along the road is not between zero and the length of the road, return false as well.
Keyword arguments
return_trip = true: if true, a route will be planned from start ⟶ finish ⟶ start. Specifyingreturn_trip = truealso requires the existence of a return path for a route to be planned.- All other keywords are passed to
LightOSM.shortest_path.
Agents.OSM.plan_random_route! — Function
OSM.plan_random_route!(agent, model::ABM{<:OpenStreetMapSpace}; kwargs...) → successPlan a new random route for the agent, by selecting a random destination and planning a route from the agent's current position. Overwrite any existing route.
The keyword limit = 10 specifies the limit on the number of attempts at planning a random route, as no connection may be possible given the random destination. Return true if a route was successfully planned, false otherwise. All other keywords are passed to plan_route!
Agents.OSM.move_along_route! — Function
OSM.move_along_route!(agent, model::ABM{<:OpenStreetMapSpace}, distance::Real) → remainingMove an agent by distance along its planned route. Units of distance are as specified by the underlying graph's weight_type. If the provided distance is greater than the distance to the end of the route, return the remaining distance. Otherwise, return 0. 0 is also returned if is_stationary(agent, model).
Agents.OSM.distance — Function
OSM.distance(pos_1, pos_2, model::ABM{<:OpenStreetMapSpace}; kwargs...)Return the distance between the two positions along the shortest path joining them in the given model. Return Inf if no such path exists.
All keywords are passed to LightOSM.shortest_path.
Agents.OSM.lonlat — Function
OSM.lonlat(pos, model)
OSM.lonlat(agent, model)Return (longitude, latitude) of current road or intersection position.
Agents.OSM.nearest_node — Function
OSM.nearest_node(lonlat::Tuple{Float64,Float64}, model::ABM{<:OpenStreetMapSpace})Return the nearest intersection position to (longitude, latitude). Quicker, but less precise than OSM.nearest_road.
Agents.OSM.road_length — Function
OSM.road_length(start::Int, finish::Int, model)
OSM.road_length(pos::Tuple{Int,Int,Float64}, model)Return the road length between two intersections. This takes into account the direction of the road, so OSM.road_length(pos_1, pos_2, model) may not be the same as OSM.road_length(pos_2, pos_1, model). Units of the returned quantity are as specified by the underlying graph's weight_type. If start and finish are the same or pos[1] and pos[2] are the same, then return 0.
Agents.OSM.route_length — Function
OSM.route_length(agent, model::ABM{<:OpenStreetMapSpace})Return the length of the route planned for the given agent, correctly taking into account the amount of route already traversed by the agent. Return 0 if OSM.is_stationary(agent, model).
Agents.OSM.get_geoloc — Function
OSM.get_geoloc(pos::Int, model::ABM{<:OpenStreetMapSpace})Return GeoLocation corresponding to node pos.
Agents.OSM.same_position — Function
OSM.same_position(a::Tuple{Int,Int,Float64}, b::Tuple{Int,Int,Float64}, model::ABM{<:OpenStreetMapSpace})Return true if the given positions a and b are (approximately) identical
Agents.OSM.same_road — Function
OSM.same_road(a::Tuple{Int,Int,Float64}, b::Tuple{Int,Int,Float64})Return true if both points lie on the same road of the graph
Agents.OSM.closest_node_on_edge — Function
OSM.closest_node_on_edge(a::Tuple{Int,Int,Float64}, model::ABM{<:OpenStreetMapSpace})Return the node that the given point is closest to on its edge.
Nearby Agents
Agents.nearby_ids — Function
nearby_ids(pos, model::ABM, r = 1; kwargs...) → idsReturn an iterable over the IDs of the agents within distance r (inclusive) from the given position. The position must match type with the spatial structure of the model. The specification of what "distance" means depends on the space, hence it is explained in each space's documentation string. Keyword arguments are space-specific and also described in each space's documentation string.
nearby_ids always includes IDs with 0 distance to pos.
nearby_ids(agent::AbstractAgent, model::ABM, r=1)Same as nearby_ids(agent.pos, model, r) but the iterable excludes the given agent's id.
Agents.nearby_agents — Function
nearby_agents(agent, model::ABM, r = 1; kwargs...) -> agentReturn an iterable of the agents near the position of the given agent.
The value of the argument r and possible keywords operate identically to nearby_ids.
Agents.nearby_positions — Function
nearby_positions(pos, model::ABM{<:DiscreteSpace}, r=1; kwargs...)Return an iterable of all positions within "radius" r of the given position (which excludes given position). The position must match type with the spatial structure of the model.
The value of r and possible keywords operate identically to nearby_ids.
This function only exists for discrete spaces with a finite amount of positions.
nearby_positions(position, model::ABM{<:OpenStreetMapSpace}; kwargs...) → positionsFor OpenStreetMapSpace this means "nearby intersections" and operates directly on the underlying graph of the OSM, providing the intersection nodes nearest to the given position.
nearby_positions(agent::AbstractAgent, model::ABM, r=1)Same as nearby_positions(agent.pos, model, r).
Agents.random_nearby_id — Function
random_nearby_id(agent, model::ABM, r = 1, f = nothing, alloc = false; kwargs...) → idReturn the id of a random agent near the position of the given agent.
Return nothing if no agents are nearby.
The value of the argument r and possible keywords operate identically to nearby_ids.
A filter function f(id) can be passed so that to restrict the sampling on only those ids for which the function returns true. The argument alloc can be used if the filtering condition is expensive since in this case the allocating version can be more performant. nothing is returned if no nearby id satisfies f.
For discrete spaces, use random_id_in_position instead to return a random id at a given position.
This function, as all the other methods which sample from lazy iterators, uses an optimized algorithm which doesn't require to collect all elements to just sample one of them.
Agents.random_nearby_agent — Function
random_nearby_agent(agent, model::ABM, r = 1, f = nothing, alloc = false; kwargs...) → agentReturn a random agent near the position of the given agent or nothing if no agent is nearby.
The value of the argument r and possible keywords operate identically to nearby_ids.
A filter function f(agent) can be passed so that to restrict the sampling on only those agents for which the function returns true. The argument alloc can be used if the filtering condition is expensive since in this case the allocating version can be more performant. nothing is returned if no nearby agent satisfies f.
For discrete spaces, use random_agent_in_position instead to return a random agent at a given position.
Agents.random_nearby_position — Function
random_nearby_position(pos, model::ABM, r=1, f = nothing, alloc = false; kwargs...) → positionReturn a random position near the given position. Return nothing if the space doesn't allow for nearby positions.
The value of the argument r and possible keywords operate identically to nearby_positions.
A filter function f(pos) can be passed so that to restrict the sampling on only those positions for which the function returns true. The argument alloc can be used if the filtering condition is expensive since in this case the allocating version can be more performant. nothing is returned if no nearby position satisfies f.
A note on iteration
Most iteration in Agents.jl is dynamic and lazy, when possible, for performance reasons.
Dynamic means that when iterating over the result of e.g. the ids_in_position function, the iterator will be affected by actions that would alter its contents. Specifically, imagine the scenario
using Agents
# We don't need to make a new agent type here,
# we use the minimal agent for 4-dimensional grid spaces
model = StandardABM(GridAgent{4}, GridSpace((5, 5, 5, 5)))
add_agent!((1, 1, 1, 1), model)
add_agent!((1, 1, 1, 1), model)
add_agent!((2, 1, 1, 1), model)
for id in ids_in_position((1, 1, 1, 1), model)
remove_agent!(id, model)
end
collect(allids(model))2-element Vector{Int64}:
2
3You will notice that only 1 agent was removed. This is simply because the final state of the iteration of ids_in_position was reached unnaturally, because the length of its output was reduced by 1 during iteration. To avoid problems like these, you need to collect the iterator to have a non dynamic version.
Lazy means that when possible the outputs of the iteration are not collected and instead are generated on the fly. A good example to illustrate this is nearby_ids, where doing something like
a = random_agent(model)
sort!(nearby_ids(random_agent(model), model))leads to error, since you cannot sort! the returned iterator. This can be easily solved by adding a collect in between:
a = random_agent(model)
sort!(collect(nearby_agents(a, model)))1-element Vector{GridAgent{4}}:
GridAgent{4}(3, (2, 1, 1, 1))Higher-order interactions
There may be times when pair-wise, triplet-wise or higher interactions need to be accounted for across most or all of the model's agent population. The following methods provide an interface for such calculation.
These methods follow the conventions outlined above in A note on iteration.
Agents.iter_agent_groups — Function
iter_agent_groups(order::Int, model::ABM; scheduler = Schedulers.by_id)Return an iterator over all agents of the model, grouped by order. When order = 2, the iterator returns agent pairs, e.g (agent1, agent2) and when order = 3: agent triples, e.g. (agent1, agent7, agent8). order must be larger than 1 but has no upper bound.
Index order is provided by the scheduler input which is a scheduler.
Agents.map_agent_groups — Function
map_agent_groups(order::Int, f::Function, model::ABM; kwargs...)
map_agent_groups(order::Int, f::Function, model::ABM, filter::Function; kwargs...)Applies function f to all grouped agents of an iter_agent_groups iterator. kwargs are passed to the iterator method. f must take the form f(NTuple{O,AgentType}), where the dimension O is equal to order.
Optionally, a filter function that accepts an iterable and returns a Bool can be applied to remove unwanted matches from the results. Note: This option cannot keep matrix order, so should be used in conjunction with index_mapped_groups to associate agent ids with the resultant data.
Agents.index_mapped_groups — Function
index_mapped_groups(order::Int, model::ABM; scheduler = Schedulers.ByID)
index_mapped_groups(order::Int, model::ABM, filter::Function; scheduler = Schedulers.ByID)Return an iterable of agent ids in the model, meeting the filter criteria if used.
Data collection and analysis
Agents.run! — Function
run!(model::ABM, t::Union{Real, Function}; kwargs...)Run the model (evolve via step!(model, t)) while at the same time collecting data specified by the keywords, explained one by one below. Return the data as two DataFrames, agent_df, model_df, one for agent-level data and one for model-level data.
See also offline_run! to write data to file while running the model.
Data-deciding keywords
adata::Vectormeans "agent data to collect". If an entry is aSymbol, e.g.:weight, then the data for this entry is agent's fieldweight. If an entry is aFunction, e.g.f, then the data for this entry is justf(a)for each agenta. The resulting dataframe columns are named with the input symbol (here:weight, :f).adata::Vector{<:Tuple}: ifadatais a vector of tuples instead, data aggregation is done over the agent properties.For each 2-tuple, the first entry is the "key" (any entry like the ones mentioned above, e.g.
:weight, f). The second entry is an aggregating function that aggregates the key, e.g.mean, maximum. So, continuing from the above example, we would haveadata = [(:weight, mean), (f, maximum)].It's also possible to provide a 3-tuple, with the third entry being a conditional function (returning a
Bool), which assesses if each agent should be included in the aggregate. For example:x_pos(a) = a.pos[1]>5with(:weight, mean, x_pos)will result in the average weight of agents conditional on their x-position being greater than 5.The resulting data name columns use the function
dataname. They create something like:mean_weightor:maximum_f_x_pos. In addition, you can use anonymous functions in a list comprehension to assign elements of an array into different columns:adata = [(a)->(a.interesting_array[i]) for i=1:N]. Column names can also be renamed withDataFrames.rename!after data is collected.Notice: Aggregating only works if there are agents to be aggregated over. If you remove agents during model run, you should modify the aggregating functions. E.g. instead of passing
mean, passmymean(a) = isempty(a) ? 0.0 : mean(a).mdata::Vectormeans "model data to collect" and works exactly likeadata. For the model, no aggregation is possible (nothing to aggregate over).Alternatively,
mdatacan also be a function. This is a "generator" function, that acceptsmodelas input and provides aVectorthat representsmdata. Useful in combination with anensemblerun!call that requires a generator function.
By default both keywords are nothing, i.e. nothing is collected/aggregated.
Mixed-Models
For mixed-models, the adata keyword has some additional options & properties. An additional column agent_type will be placed in the output dataframe.
In the case that data is needed for one agent type that does not exist in a second agent type, missing values will be added to the dataframe.
Warning: Since this option is inherently type unstable, try to avoid this in a performance critical situation.
Aggregate functions will fail if missing values are not handled explicitly. If a1.weight but a2 (type: Agent2) has no weight, use a2(a) = a isa Agent2; adata = [(:weight, sum, a2)] to filter out the missing results.
Other keywords
when = 1: at which times to perform the data collection and processing. A lot of flexibility is offered based on the type ofwhen. Lett = abmtime(model)(which is updated throughout therun!process).when::Real: data are collected each time the model is evolved for at leastwhenunits of time. For discrete time models likeStandardABMthis must be an integer and in essence it means how many steps to evolve between each data collection. For continuous time models likeEventQueueABMwhenis the least amount of time to evolve the model (with maximum being until an upcoming event is triggered).when::AbstractVector: data are collected fort ∈ when.when::Function: data are collected wheneverwhen(model, t)returnstrue.
when_model = when: same aswhenbut for model data.init = true: Whether to collect data at the initial model state before it is stepped.dt = 0.01: minimum stepping time for continuous time models between data collection checks ofwhenand possible data recording time. Ifwhen isa Realthen it must holddt ≤ minimum(when, when_model). This keyword is ignored for discrete time models as it is 1 by definition.obtainer = identity: method to transfer collected data to theDataFrame. Typically only change this tocopyif some data are mutable containers (e.g.Vector) which change during evolution, ordeepcopyif some data are nested mutable containers. Both of these options have performance penalties.showprogress=false: Whether to show progress.
Agents.ensemblerun! — Function
ensemblerun!(models::Vector, n; kwargs...)Perform an ensemble simulation of run! for all model ∈ models. Each model should be a (different) instance of an AgentBasedModel but probably initialized with a different random seed or different initial agent distribution. All models obey the same evolution rules contained in the model and are evolved for n.
Similarly to run! this function will collect data. It will furthermore add one additional column to the dataframe called :ensemble, which has an integer value counting the ensemble member. The function returns agent_df, model_df, models.
If you want to scan parameters and at the same time run multiple simulations at each parameter combination, simply use seed as a parameter, and use that parameter to tune the model's initial random seed and/or agent distribution.
See example usage in Schelling's segregation model.
Keywords
The following keywords modify the ensemblerun! function:
parallel::Bool = falsewhetherDistributed.pmapis invoked to run simulations in parallel. This must be used in conjunction with@everywhere(see Performance Tips).showprogress::Bool = falsewhether a progressbar will be displayed to indicate % runs finished.
All other keywords are propagated to run! as-is.
ensemblerun!(generator, n; kwargs...)Generate many ABMs and propagate them into ensemblerun!(models, ...) using the provided generator which is a one-argument function whose input is a seed.
This method has additional keywords ensemble = 5, seeds = rand(UInt32, ensemble).
Agents.paramscan — Function
paramscan(parameters::AbstractDict, initialize; kwargs...) → adf, mdfPerform a parameter scan of an ABM simulation output by collecting data from all parameter combinations into dataframes (one for agent data, one for model data). The dataframes columns are both the collected data (as in run!) but also the input parameter values used.
parameters is a dictionary with key type Symbol. Each entry of the dictionary maps a parameter key to the parameter values that should be scanned over (or to a single parameter value that will remain constant throughout the scans). The approach regarding parameters is as follows:
- If the value of a specific key is a
Vector, all values of the vector are expended as values for the parameter to scan over. - If the value of a specific key is not a
Vector, it is assumed that whatever this value is, it corresponds to a single and constant parameter value and therefore it is not expanded or scanned over.
This is done so that parameter values that are inherently iterable (such as a String) are not wrongly expanded into their constituents. (if the value of a parameter is itself a Vector, then you need to pass in a vector of vectors to scan the parameter)
The second argument initialize is a function that creates an ABM and returns it. It must accept keyword arguments which are the keys of the parameters dictionary. Since the user decides how to use input arguments to make an ABM, parameters can be used to affect model properties, space type and creation as well as agent properties, see the example below.
Keywords
The following keywords modify the paramscan function:
include_constants::Bool = false: by default, only the varying parameters (Vectorvalues inparameters) will be included in the outputDataFrame. Iftrue, constant parameters (non-Vector inparameters) will also be included.parallel::Bool = falsewhetherDistributed.pmapis invoked to run simulations in parallel. This must be used in conjunction with@everywhere(see Performance Tips).showprogress::Bool = falsewhether a progressbar will be displayed to indicate % runs finished.
All other keywords are propagated into run!. Furthermore, n is also a keyword here, that is given to run! as argument. Naturally, the number of time steps n and at least one of adata, mdata are mandatory. The adata, mdata lists shouldn't contain the parameters that are already in the parameters dictionary to avoid duplication.
Example
A runnable example that uses paramscan is shown in Schelling's segregation model. Run the Shelling agent definition and sheclling_step!() from there, and the following code:
function initialize(; numagents = 320, griddims = (20, 20), min_to_be_happy = 3)
space = GridSpaceSingle(griddims, periodic = false)
properties = Dict(:min_to_be_happy => min_to_be_happy)
model = StandardABM(Schelling, space;
properties = properties, agent_step! = schelling_step!, scheduler = Schedulers.Randomly())
for n in 1:numagents
add_agent_single!(model; group = n < numagents / 2 ? 1 : 2)
end
return model
endand do a parameter scan by doing:
happyperc(moods) = count(moods) / length(moods)
adata = [(:mood, happyperc)]
parameters = Dict(
:min_to_be_happy => collect(2:5), # expanded
:numagents => [200, 300], # expanded
:griddims => (20, 20), # not Vector = not expanded
)
adf, _ = paramscan(parameters, initialize; adata, n = 3)Manual data collection
The central simulation function is run!. Here are some functions that aid in making custom data collection loops, instead of using the run! function:
Agents.init_agent_dataframe — Function
init_agent_dataframe(model, adata) → agent_dfInitialize a dataframe to add data later with collect_agent_data!.
Agents.collect_agent_data! — Function
collect_agent_data!(df, model, properties; obtainer = identity)Collect and add agent data into df (see run! for the dispatch rules of properties and obtainer).
Agents.init_model_dataframe — Function
init_model_dataframe(model, mdata) → model_dfInitialize a dataframe to add data later with collect_model_data!. mdata can be a Vector or generator Function.
Agents.collect_model_data! — Function
collect_model_data!(df, model, properties, obtainer = identity)Same as collect_agent_data! but for model data instead. properties can be a Vector or generator Function.
Agents.dataname — Function
dataname(k) → nameReturn the name of the column of the i-th collected data where k = adata[i] (or mdata[i]). dataname also accepts tuples with aggregate and conditional values.
For example, the core loop of run! is just
df_agent = init_agent_dataframe(model, adata)
df_model = init_model_dataframe(model, mdata)
t0 = abmtime(model)
t = t0
while until(t, t0, n, model)
if should_we_collect(t, model, when)
collect_agent_data!(df_agent, model, adata)
end
if should_we_collect(t, model, when_model)
collect_model_data!(df_model, model, mdata)
end
step!(model, 1)
t = abmtime(model)
end
return df_agent, df_model(here until and should_we_collect are internal functions)
Schedulers
Agents.Schedulers — Module
SchedulersSubmodule containing all predefined schedulers of Agents.jl that can be used with StandardABM.
Schedulers have a very simple interface. They are functions that take as an input the ABM and return an iterator over agent IDs: f(model) -> iterator. Notice that this iterator can be non-allocated specialized type or just a standard vector of IDs.
Schedulers have many purposes:
- Can be given in
StandardABMas a default scheduler. This functionality is only meaningful when theagent_step!has been configured. The functionschedule(model)will return the scheduled IDs. - Can be used by a user when performing manual scheduling in case
agent_step!has not been configured. - Can be used to globally filter agents by type/property/whatever. For example, one can use the
ByPropertyscheduler to simply obtain the list of all agent IDs that satisfy a particular property.
See also Advanced scheduling for making more advanced schedulers.
Agents.schedule — Function
schedule(model::StandardABM) → idsReturn an iterator over the scheduled IDs using the model's default scheduler.
Predefined schedulers
Some useful schedulers are available below as part of the Agents.jl API:
Agents.Schedulers.fastest — Function
Schedulers.fastestA scheduler that orders all agent IDs in the fastest way possible, which is the default order dictated by the agent container.
Agents.Schedulers.ByID — Type
Schedulers.ByID()A scheduler that orders all agent IDs by their integer value.
Agents.Schedulers.Randomly — Type
Schedulers.Randomly()A scheduler that randomly orders all agent IDs. Different random ordering is used at each different step.
Agents.Schedulers.Partially — Type
Schedulers.Partially(p)A scheduler that orders only p percentage of randomly chosen agent IDs.
Agents.Schedulers.ByProperty — Type
Schedulers.ByProperty(property)A scheduler that orders agent IDs by their property, with agents with greater property being ordered first. property can be a Symbol, which just dictates which field of the agents to compare, or a function which inputs an agent and outputs a real number.
Agents.Schedulers.ByType — Type
Schedulers.ByType(shuffle_types::Bool, shuffle_agents::Bool, agent_union)A scheduler useful only for mixed agent models using Union types.
- Setting
shuffle_types = truegroups by agent type, but randomizes the type order. Otherwise returns agent IDs grouped in order of appearance in theUnion. shuffle_agents = truerandomizes the order of agents within each group,falsereturns the default order of the container (equivalent toSchedulers.fastest).agent_unionis aUnionof all valid agent types (as passed toABM)
Schedulers.ByType((C, B, A), shuffle_agents::Bool)A scheduler that orders agent IDs by type in specified order (since Unions are not order preserving). shuffle_agents = true randomizes the order of agents within each group.
Advanced scheduling
You can use Function-like objects to make your scheduling possible of arbitrary events. For example, imagine that after the n-th step of your simulation you want to fundamentally change the order of agents. To achieve this you can define
mutable struct MyScheduler
n::Int # step number
w::Float64
endand then define a calling method for it like so
function (ms::MyScheduler)(model::ABM)
ms.n += 1 # increment internal counter by 1 each time its called
# be careful to use a *new* instance of this scheduler when plotting!
if ms.n < 10
return allids(model) # order doesn't matter in this case
else
ids = collect(allids(model))
# filter all ids whose agents have `w` less than some amount
filter!(id -> model[id].w < ms.w, ids)
return ids
end
endand pass it to e.g. step! by initializing it
ms = MyScheduler(100, 0.5)
step!(model, agentstep, modelstep, 100; scheduler = ms)How to use Distributed
To use the parallel=true option of ensemblerun! you need to load Agents and define your fundamental types at all processors. See the Performance Tips page for parallelization.
Path-finding
Agents.Pathfinding — Module
PathfindingSubmodule containing functionality for path-finding based on the A* algorithm. Currently available for GridSpace and ContinuousSpace. Discretization of ContinuousSpace is taken care of internally.
You can enable path-finding and set its options by creating an instance of a Pathfinding.AStar struct. This must be passed to the relevant pathfinding functions during the simulation. Call plan_route! to set the destination for an agent. This triggers the algorithm to calculate a path from the agent's current position to the one specified. You can alternatively use Pathfinding.plan_best_route! to choose the best target from a list. Once a target has been set, you can move an agent one step along its precalculated path using the Pathfinding.move_along_route! function.
Refer to the Maze Solver, Mountain Runners and Rabbit, Fox, Hawk examples using path-finding.
The submodule exports the following functions:
Agents.Pathfinding.AStar — Type
Pathfinding.AStar(space; kwargs...)Enables pathfinding for agents in the provided space (which can be a GridSpace or ContinuousSpace) using the A* algorithm. This struct must be passed into any pathfinding functions.
For ContinuousSpace, a walkmap or instance of PenaltyMap must be provided to specify the level of discretisation of the space.
Keywords
diagonal_movement = truespecifies if movement can be to diagonal neighbors of a tile, or only orthogonal neighbors. Only available forGridSpaceadmissibility = 0.0allows the algorithm to approximate paths to speed up pathfinding. A value ofadmissibilityallows paths with at most(1+admissibility)times the optimal length.walkmap = trues(spacesize(space))specifies the (un)walkable positions of the space. If specified, it should be aBitArrayof the same size as the correspondingGridSpace. By default, agents can walk anywhere in the space.cost_metric = DirectDistance{D}()is an instance of a cost metric and specifies the metric used to approximate the distance between any two points.
Utilization of all features of AStar occurs in the 3D Mixed-Agent Ecosystem with Pathfinding example.
Agents.Pathfinding.penaltymap — Function
Pathfinding.penaltymap(pathfinder)Return the penalty map of a Pathfinding.AStar if the Pathfinding.PenaltyMap metric is in use, nothing otherwise.
It is possible to mutate the map directly, for example Pathfinding.penaltymap(pathfinder)[15, 40] = 115 or Pathfinding.penaltymap(pathfinder) .= rand(50, 50). If this is mutated, a new path needs to be planned using plan_route!.
Path-finding planning and moving
Agents.Pathfinding.plan_route! — Function
Pathfinding.plan_route!(agent, dest, pathfinder::AStar{D})Calculate and store the shortest path to move the agent from its current position to dest (a position e.g. (1, 5) or (1.3, 5.2)) using the provided pathfinder.
Use this method in conjunction with move_along_route!.
Agents.Pathfinding.plan_best_route! — Function
Pathfinding.plan_best_route!(agent, dests, pathfinder::AStar{D}; kwargs...)Calculate, store, and return the best path to move the agent from its current position to a chosen destination taken from dests using pathfinder.
The condition = :shortest keyword returns the shortest path which is shortest out of the possible destinations. Alternatively, the :longest path may also be requested.
Return the position of the chosen destination. Return nothing if none of the supplied destinations are reachable.
Agents.Pathfinding.move_along_route! — Function
Pathfinding.move_along_route!(agent, model::ABM{<:GridSpace{D}}, pathfinder::AStar{D})Move agent for one step along the route toward its target set by plan_route!. For pathfinding in models with GridSpace.
If the agent does not have a precalculated path or the path is empty, it remains stationary.
move_along_route!(agent, model::ABM{<:ContinuousSpace{D}}, pathfinder::AStar{D}, speed, dt = 1.0)Move agent for one step along the route toward its target set by plan_route! at the given speed and timestep dt.
For pathfinding in models with ContinuousSpace.
If the agent does not have a precalculated path or the path is empty, it remains stationary.
Agents.Pathfinding.is_stationary — Function
Pathfinding.is_stationary(agent, pathfinder::AStar)Return true if agent has reached the end of its route, or no route has been set for it.
Agents.Pathfinding.nearby_walkable — Function
Pathfinding.nearby_walkable(position, model::ABM{<:GridSpace{D}}, pathfinder::AStar{D}, r = 1)Return an iterator over all nearby_positions within "radius" r of the given position (excluding position), which are walkable as specified by the given pathfinder.
Agents.Pathfinding.random_walkable — Function
Pathfinding.random_walkable(model, pathfinder::AStar{D})Return a random position in the given model that is walkable as specified by the given pathfinder.
Pathfinding.random_walkable(pos, model::ABM{<:ContinuousSpace{D}}, pathfinder::AStar{D}, r = 1.0)Return a random position within radius r of pos which is walkable, as specified by pathfinder. Return pos if no such position exists.
Pathfinding Metrics
Agents.Pathfinding.DirectDistance — Type
Pathfinding.DirectDistance{D}([direction_costs::Vector{Int}]) <: CostMetric{D}Distance is approximated as the shortest path between the two points, provided the walkable property of Pathfinding.AStar allows. Optionally provide a Vector{Int} that represents the cost of going from a tile to the neighboring tile on the i dimensional diagonal (default is 10√i).
If diagonal_movement=false in Pathfinding.AStar, neighbors in diagonal positions will be excluded. Cost defaults to the first value of the provided vector.
Agents.Pathfinding.MaxDistance — Type
Pathfinding.MaxDistance{D}() <: CostMetric{D}Distance between two tiles is approximated as the maximum of absolute difference in coordinates between them.
Agents.Pathfinding.PenaltyMap — Type
Pathfinding.PenaltyMap(pmap::Array{Int,D} [, base_metric::CostMetric]) <: CostMetric{D}Distance between two positions is the sum of the shortest distance between them and the absolute difference in penalty.
A penalty map (pmap) is required. For pathfinding in GridSpace, this should be the same dimensions as the space. For pathfinding in ContinuousSpace, the size of this map determines the granularity of the underlying grid, and should agree with the size of the walkable map.
Distance is calculated using Pathfinding.DirectDistance by default, and can be changed by specifying base_metric.
An example usage can be found in Mountain Runners.
Building a custom metric is straightforward, if the provided ones do not suit your purpose. See the Developer Docs for details.
Save, Load, Checkpoints
There may be scenarios where interacting with data in the form of files is necessary. The following functions provide an interface to save/load data to/from files.
Agents.AgentsIO.save_checkpoint — Function
AgentsIO.save_checkpoint(filename, model::ABM)Write the entire model to file specified by filename. The following points should be considered before using this functionality:
- OpenStreetMap data is not saved. The path to the map should be specified when loading the model using the
mapkeyword ofAgentsIO.load_checkpoint. - Functions are not saved, including stepping functions, schedulers, and
update_vel!. The last two can be provided toAgentsIO.load_checkpointusing the appropriate keyword arguments.
Agents.AgentsIO.load_checkpoint — Function
AgentsIO.load_checkpoint(filename; kwargs...)Load the model saved to the file specified by filename.
Keywords
scheduler = Schedulers.fastestspecifies what scheduler should be used for the model.warn = truecan be used to disable warnings from type checks on the agent type.
ContinuousSpace specific:
update_vel!specifies a function that should be used to update each agent's velocity before it is moved. Refer toContinuousSpacefor details.
OpenStreetMapSpace specific:
mapis a path to the OpenStreetMap to be used for the space. This is a required parameter if the space isOpenStreetMapSpace.use_cache = false,trim_to_connected_graph = truerefer toOpenStreetMapSpace
Agents.AgentsIO.populate_from_csv! — Function
AgentsIO.populate_from_csv!(model, filename [, agent_type, col_map]; row_number_is_id, kwargs...)Populate the given model using CSV data contained in filename. Use agent_type to specify the type of agent to create (In the case of multi-agent models) or a function that returns an agent to add to the model. The CSV row is splatted into the agent_type constructor/function.
col_map is a Dict{Symbol,Int} specifying a mapping of keyword-arguments to row number. If col_map is specified, the specified data is splatted as keyword arguments.
The keyword row_number_is_id = false specifies whether the row number will be passed as the first argument (or as id keyword) to agent_type.
Any other keyword arguments are forwarded to CSV.Rows. If the types keyword is not specified and agent_type is a struct, then the mapping from struct field to type will be used. Tuple{...} fields will be suffixed with _1, _2, ... similarly to AgentsIO.dump_to_csv
For example,
struct Foo <: AbstractAgent
id::Int
pos::NTuple{2,Int}
foo::Tuple{Int,String}
end
model = StandardABM(Foo, ...)
AgentsIO.populate_from_csv!(model, "test.csv")Here, types will be inferred to be
Dict(
:id => Int,
:pos_1 => Int,
:pos_2 => Int,
:foo_1 => Int,
:foo_2 => String,
)It is not necessary for all these fields to be present as columns in the CSV. Any column names that match will be converted to the appropriate type. There should exist a constructor for Foo taking the appropriate combination of fields as parameters.
If "test.csv" contains the following columns: pos_1, pos_2, foo_1, foo_2, then model can be populated as AgentsIO.populate_from_csv!(model, "test.csv"; row_number_is_id = true).
Agents.AgentsIO.dump_to_csv — Function
AgentsIO.dump_to_csv(filename, agents [, fields]; kwargs...)Dump agents to the CSV file specified by filename. agents is any iterable sequence of types, such as from allagents. fields is an iterable sequence of Symbols specifying which fields of each agent are dumped. If not explicitly specified, it is automatically inferred using eltype(agents). All kwargs... are forwarded to CSV.write.
All Tuple{...} fields are flattened to multiple columns suffixed by _1, _2... similarly to AgentsIO.populate_from_csv!
For example,
struct Foo <: AbstractAgent
id::Int
pos::NTuple{2,Int}
foo::Tuple{Int,String}
end
model = StandardABM(Foo, ...)
...
AgentsIO.dump_to_csv("test.csv", allagents(model))The resultant "test.csv" file will contain the following columns: id, pos_1, pos_2, foo_1, foo_2.
It is also possible to write data to file at predefined intervals while running your model, instead of storing it in memory:
Agents.offline_run! — Function
offline_run!(model, t::Union{Real, Function}; kwargs...)Do the same as run!, but instead of collecting all the data into an in-memory dataframe, write the output to a file after collecting data writing_interval times and empty the dataframe after each write. Useful when the amount of collected data is expected to exceed the memory available during execution.
Keywords
backend=:csv: backend to use for writing data. Currently supported backends::csv,:arrow.adata_filename="adata.$backend": a file to write agent data on. Appends to the file if it already exists, otherwise creates the file.mdata_filename="mdata.$backend": a file to write the model data on. Appends to the file if it already exists, otherwise creates the file.writing_interval=1: write to file everywriting_intervaltimes data collection is triggered (which is set by thewhenandwhen_modelkeywords).- All other keywords are propagated to
run!.
In case you require custom serialization for model properties, refer to the Developer Docs for details.
Visualizations
Agents.abmplot — Function
abmplot(model::ABM; kwargs...) → fig, ax, abmobs
abmplot!(ax::Axis/Axis3, model::ABM; kwargs...) → abmobsPlot an agent based model by plotting each individual agent as a marker and using the agent's position field as its location on the plot. abmplot is also used to launch interactive GUIs for evolving agent based models, see "Interactivity" below.
See also abmvideo and abmexploration.
abmplot returns an instance of ABMObservable that can be used to manually animate the model evolution, or make custom composite plots and videos. See the online documentation for examples on using this. Instead of model::ABM, an instance of ABMObservable can also be given to abmplot directly.
Keyword arguments
Agent related
agent_color, agent_size, agent_marker: These three keywords decide the color, size, and marker, that each agent will be plotted as. They can each be either a constant or a function, which takes as an input a single agent and outputs the corresponding value. If the model uses aGraphSpace,agent_color, agent_size, agent_markerfunctions instead take an iterable of agents in each position (i.e. node of the graph).Example using constants:
agent_color = "#338c54", agent_size = 15, agent_marker = :diamondExample using functions:
agent_color(a) = a.status == :S ? "#2b2b33" : a.status == :I ? "#bf2642" : "#338c54" agent_size(a) = 10rand() agent_marker(a) = a.status == :S ? :circle : a.status == :I ? :diamond : :rectFor 2D models,
agent_markercan be/return aMakie.Polygoninstance, which plots each agent as an arbitrary polygon. It is assumed that the origin (0, 0) is the agent's position when creating the polygon. In this case, the keywordagent_sizeis ignored, as each polygon has its own size. Use the functionsscale, rotate_polygonto transform this polygon.3D models currently do not support having different markers. As a result,
agent_markercannot be a function. It should be aMeshor 3D primitive (such asSphereorRect3D).offset = nothing: If notnothing, it must be a function taking as an input an agent and outputting an offset position tuple to be added to the agent's position (which matters only if there is overlap).agentsplotkwargs = NamedTuple(): Additional keyword arguments propagated to the function that plots the agents (typicallyscatter!).
Extra plots related
heatarray = nothing: A keyword that plots a model property (that is a matrix) as a heatmap over the space. Its values can be standard data accessors given to functions likerun!, i.e. either a symbol (directly obtain model property) or a function of the model. If the space isAbstractGridSpacethen matrix must be the same size as the underlying space. ForContinuousSpaceany size works and will be plotted over the space extent. For exampleheatarray = :temperatureis used in the Daisyworld example. But you could also definef(model) = create_matrix_from_model...and setheatarray = f. The heatmap will be updated automatically during model evolution in videos and interactive applications.heatkwargs = NamedTuple(): Keywords given toMakie.heatmapfunction ifheatarrayis not nothing.add_colorbar = true: Whether or not a Colorbar should be added to the right side of the heatmap ifheatarrayis not nothing. It is strongly recommended to useabmplotinstead of theabmplot!method if you useheatarray, so that a colorbar can be placed naturally.colorbar_label = "": Label to add to the colorbar, if any.preplot!: A functionf(ax, abmobs)that plots something after the heatmap, and after space-specific plotting, but before the agents.spaceplotkwargs = NamedTuple(): keywords utilized when plotting the space, if the space extends thespaceplot!function (currently onlyOpenStreetMapSpace).adjust_aspect = true: Adjust axis aspect ratio to be the model's space data aspect ratio.
The stand-alone function abmplot also takes two optional NamedTuples named figure and axis which can be used to change the automatically created Figure and Axis objects.
Interactivity
Evolution related
add_controls::Bool: Iftrue,abmplotswitches to "interactive application GUI" mode where the model evolves interactively usingAgents.step!.add_controlsis by defaultfalseunlessparams(see below) is not empty.add_controlsis also alwaystrueinabmexploration. The application has the following interactive elements:- "step": advances the simulation once for
dttime. - "run": starts/stops the continuous evolution of the model.
- "reset model": resets the model to its initial state from right after starting the interactive application.
- Two sliders control the animation speed: "dt" decides how much time to evolve the model before the plot is updated, and "sleep" the
sleep()time between updates.
- "step": advances the simulation once for
enable_inspection = add_controls: Iftrue, enables agent inspection on mouse hover.dt = 1:50: The values of the "dt" slider which is the time to step the model forwards in each frame update, which callsstep!(model, dt). This defaults to1:50for discrete time models and to0.1:0.1:10.0for continuous time ones.params = Dict(): This is a dictionary which decides which parameters of the model will be configurable from the interactive application. Each entry ofparamsis a pair ofSymbolto anAbstractVector, and provides a range of possible values for the parameter named after the given symbol (see example online). Changing a value in the parameter slides is only propagated to the actual model after a press of the "update" button.
Data collection related
adata, mdata, when: Same as the keyword arguments ofAgents.run!. If either or bothadata, mdataare given, data are collected and stored in theabmobs, seeABMObservable. The same keywords provide the data plots ofabmexploration. This also adds the button "clear data" which deletes previously collected agent and model data by emptying the underlyingDataFramesadf/mdf. Reset model and clear data are independent processes.
See the documentation string of ABMObservable for custom interactive plots.
Agents.abmplot! — Function
abmplot!(ax::Axis, model::ABM; kwargs...)See abmplot.
Agents.abmexploration — Function
abmexploration(model::ABM; alabels, mlabels, kwargs...)Open an interactive application for exploring an agent based model and the impact of changing parameters on the time evolution. Requires Agents.
The application evolves an ABM interactively and plots its evolution, while allowing changing any of the model parameters interactively and also showing the evolution of collected data over time (if any are asked for, see below). The agent based model is plotted and animated exactly as in abmplot, and the model argument as well as splatted kwargs are propagated there as-is. This convencience function only works for aggregated agent data.
Calling abmexploration returns: fig::Figure, abmobs::ABMObservable. So you can save and/or further modify the figure and it is also possible to access the collected data (if any) via the ABMObservable.
Clicking the "reset" button will add a red vertical line to the data plots for visual guidance.
Keywords arguments (in addition to those in abmplot)
alabels, mlabels: If data are collected from agents or the model withadata, mdata, the corresponding plots' y-labels are automatically named after the collected data. It is also possible to providealabels, mlabels(vectors of strings with exactly same length asadata, mdata), and these labels will be used instead.figure = NamedTuple(): Keywords to customize the created Figure.axis = NamedTuple(): Keywords to customize the created Axis.plotkwargs = NamedTuple(): Keywords to customize the styling of the resultingscatterlinesplots.
Agents.abmvideo — Function
abmvideo(file, model; kwargs...)This function exports the animated time evolution of an agent based model into a video saved at given path file, by recording the behavior of the interactive version of abmplot (without sliders). The plotting is identical as in abmplot and applicable keywords are propagated.
Keywords
dt = 1: Time to evolve between each recorded frame. ForStandardABMthis must be an integer and it is identical to how many steps to take per frame.framerate = 30: The frame rate of the exported video.frames = 300: How many frames to record in total, including the starting frame.title = "": The title of the figure.showstep = true: If current step should be shown in title.figure = NamedTuple(): Figure related keywords (e.g. resolution, backgroundcolor).axis = NamedTuple(): Axis related keywords (e.g. aspect).recordkwargs = NamedTuple(): Keyword arguments given toMakie.record. You can use(compression = 1, profile = "high")for a higher quality output, and prefer theCairoMakiebackend. (compression 0 results in videos that are not playable by some software)kwargs...: All other keywords are propagated toabmplot.
Agents.ABMObservable — Type
ABMObservable(model; adata, mdata, when = true) → abmobsabmobs contains all information necessary to step an agent based model interactively, as well as collect data while stepping interactively. ABMObservable also returned by abmplot.
Calling Agents.step!(abmobs, t) will step the model for t time and collect data as in Agents.run!, using the adata, mdata, when keywords. The fields abmobs.model, abmobs.adf, abmobs.mdf are observables that contain the AgentBasedModel, and the agent and model dataframes with collected data. These observables are updated (and notify) during step!.
All plotting and interactivity should be defined by lift-ing (or map-ing) these observables according to the Observables.jl interface.
Agents.translate_polygon — Function
translate_polygon(p::Polygon, point)Translate given polygon by given point.
Agents.scale_polygon — Function
scale_polygon(p::Polygon, s)Scale given polygon by s, assuming polygon's center of reference is the origin.
Agents.rotate_polygon — Function
rotate_polygon(p::Polygon, θ)Rotate given polygon counter-clockwise by θ (in radians).